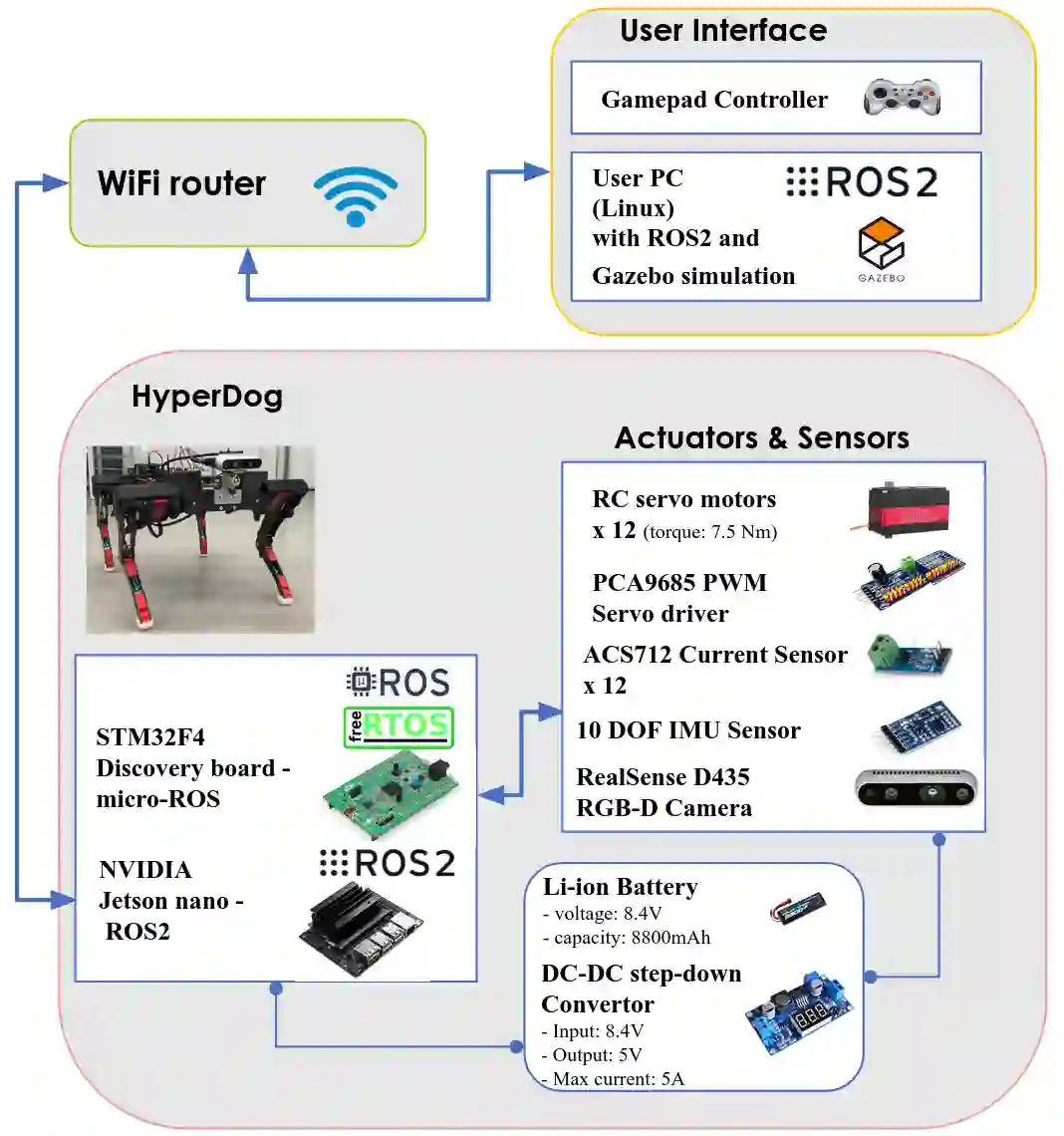
Nowadays, design and development of legged quadruped robots is a quite active area of scientific research. In fact, the legged robots have become popular due to their capabilities to adapt to harsh terrains and diverse environmental conditions in comparison to other mobile robots. With the higher demand for legged robot experiments, more researches and engineers need an affordable and quick way of locomotion algorithm development. In this paper, we present a new open source quadruped robot HyperDog platform, which features 12 RC servo motors, onboard NVIDIA Jetson nano computer and STM32F4 Discovery board. HyperDog is an open-source platform for quadruped robotic software development, which is based on Robot Operating System 2 (ROS2) and micro-ROS. Moreover, the HyperDog is a quadrupedal robotic dog entirely built from 3D printed parts and carbon fiber, which allows the robot to have light weight and good strength. The idea of this work is to demonstrate an affordable and customizable way of robot development and provide researches and engineers with the legged robot platform, where different algorithms can be tested and validated in simulation and real environment. The developed project with code is available on GitHub (https://github.com/NDHANA94/hyperdog_ros2).
翻译:目前,四重腿机器人的设计和开发是一个相当活跃的科学研究领域。事实上,双腿机器人由于能够与其他移动机器人相比适应严酷的地形和不同环境条件而成为受欢迎的对象。随着对腿式机器人实验的需求增加,更多的研究和工程师需要一种负担得起和快速的移动算法开发方法。在本文中,我们展示了一个新的开放源的四重机械机器人超音速机器人平台,该平台有12个RC Servo发动机,在NVIDIA Jetson Nam 计算机和STM32F4 Discovery Board上。超声器是四重机械软件开发的开放源平台,基于2号机器人操作系统(ROS2)和微型ROS。此外,超声器是一种四重机器人狗,完全由3D印刷部件和碳纤维组成,使机器人能够有轻重和强力。这项工作的目的是展示一种负担得起和可定制的机器人开发方式,并向研究人员和工程师提供脚式机器人开发的脚式机器人平台。超音机是一个开源平台,其基础是基于2号操作系统操作系统(ROSO2) 和微机机机能测试和模拟项目。