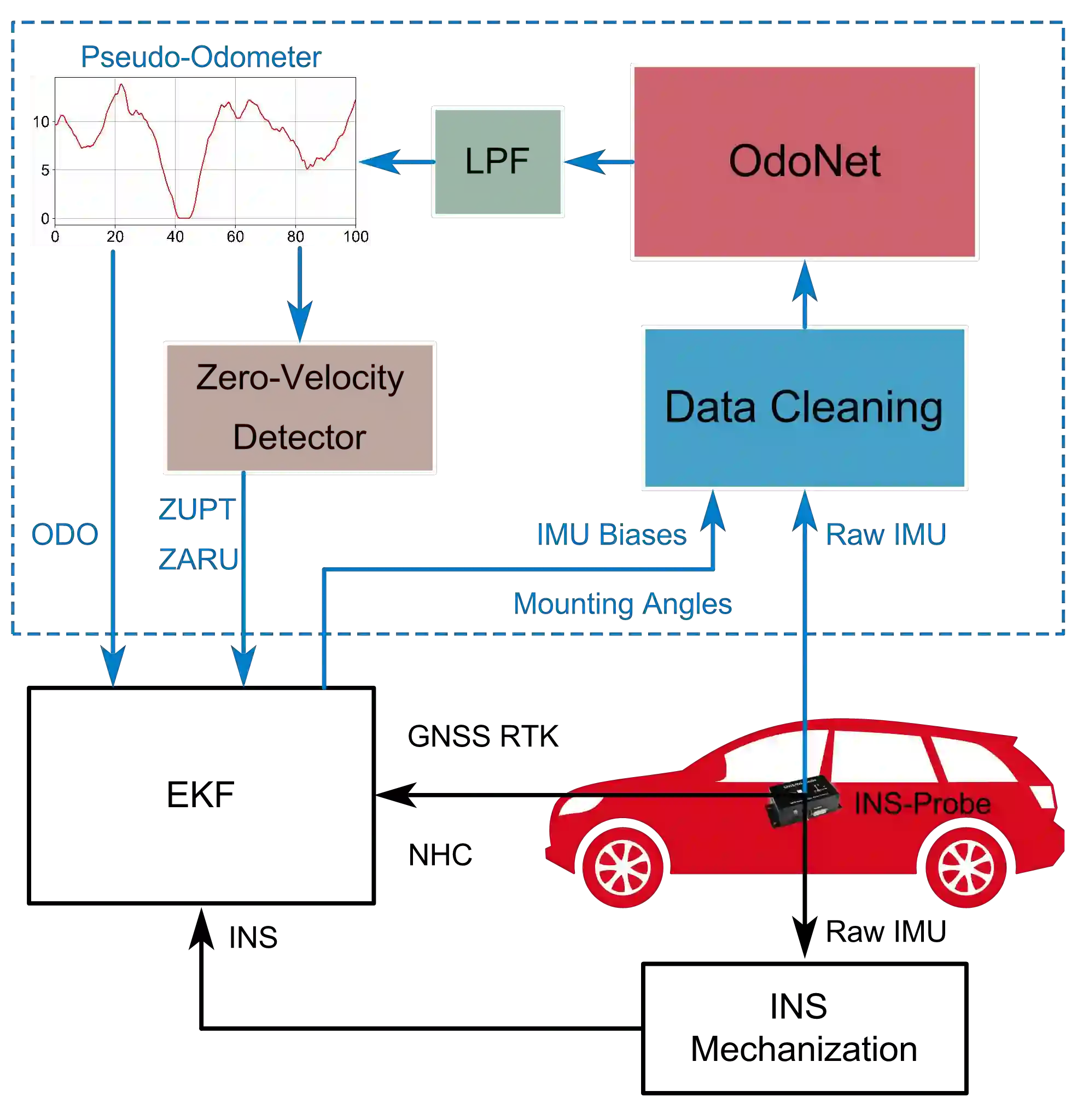
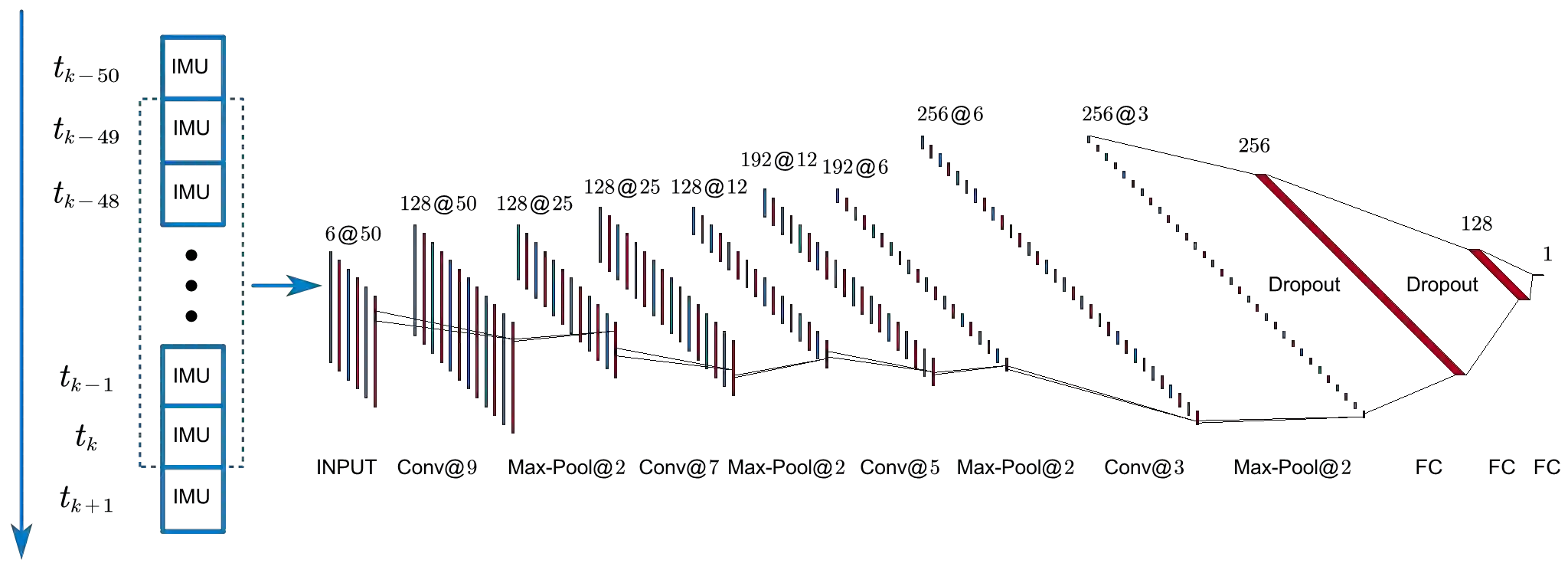
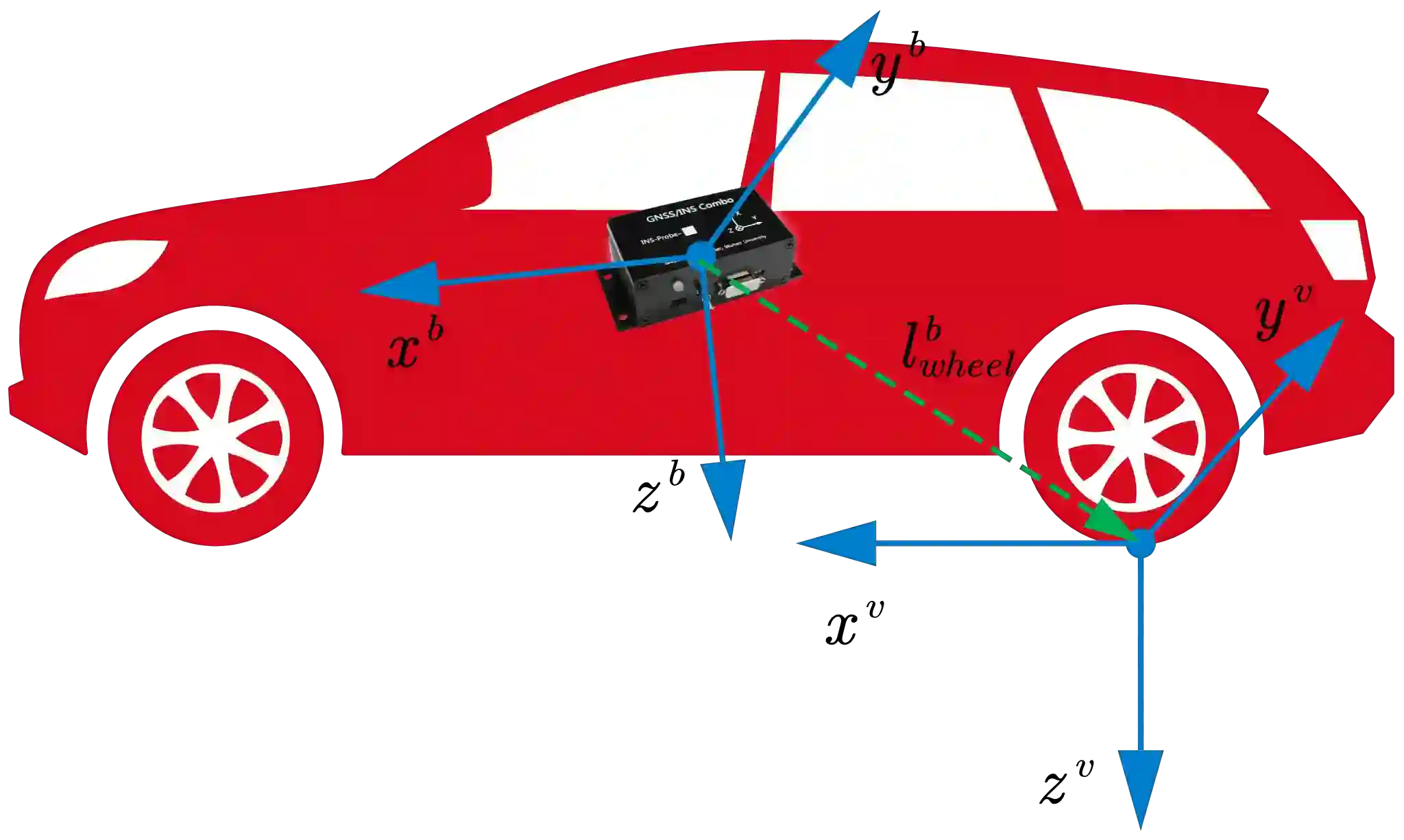
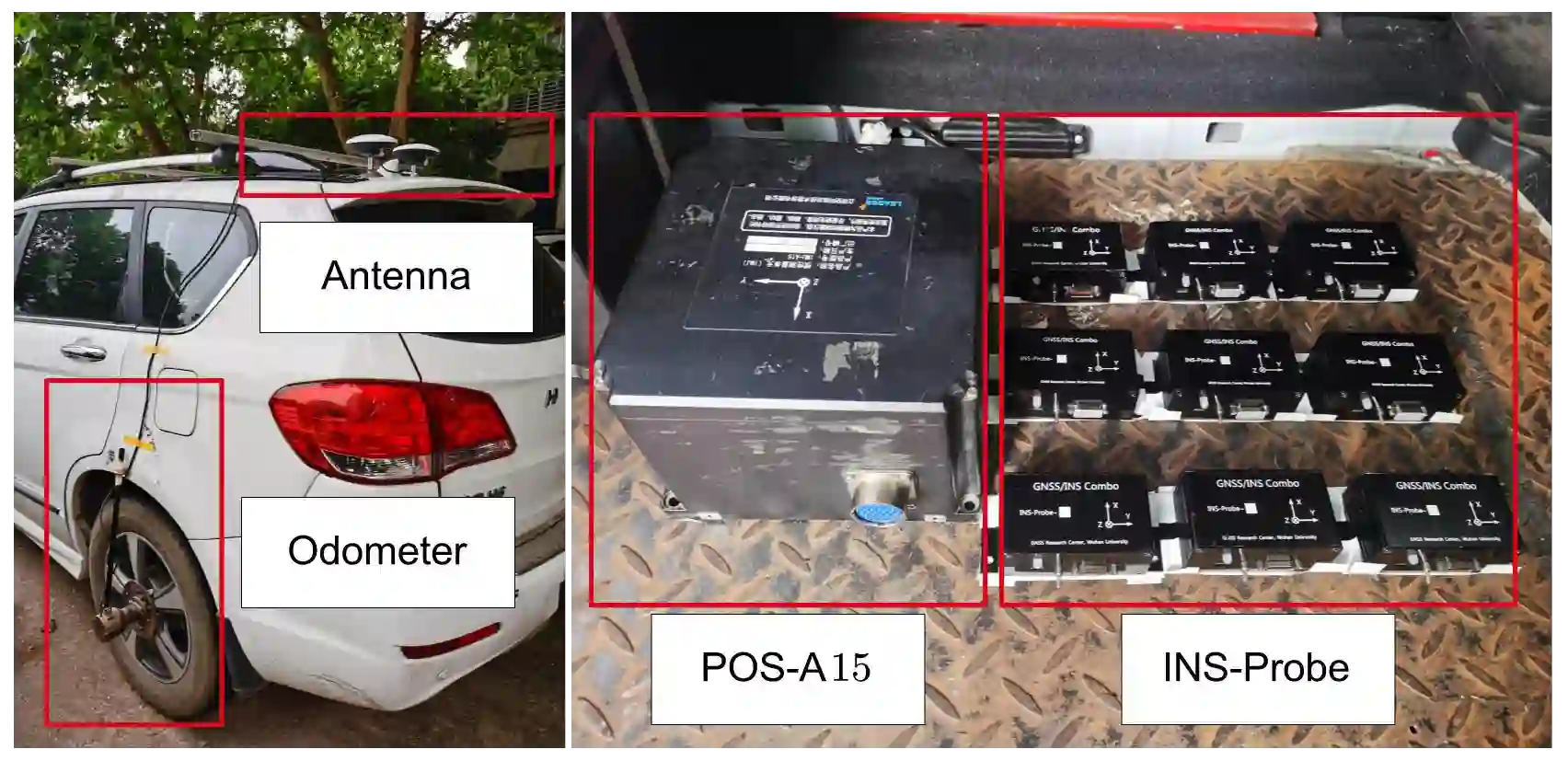
Odometer has been proven to significantly improve the accuracy of the Global Navigation Satellite System / Inertial Navigation System (GNSS/INS) integrated vehicle navigation in GNSS-challenged environments. However, the odometer is inaccessible in many applications, especially for aftermarket devices. To apply forward speed aiding without hardware wheeled odometer, we propose OdoNet, an untethered one-dimensional Convolution Neural Network (CNN)-based pseudo-odometer model learning from a single Inertial Measurement Unit (IMU), which can act as an alternative to the wheeled odometer. Dedicated experiments have been conducted to verify the feasibility and robustness of the OdoNet. The results indicate that the IMU individuality, the vehicle loads, and the road conditions have little impact on the robustness and precision of the OdoNet, while the IMU biases and the mounting angles may notably ruin the OdoNet. Thus, a data-cleaning procedure is added to effectively mitigate the impacts of the IMU biases and the mounting angles. Compared to the process using only non-holonomic constraint (NHC), after employing the pseudo-odometer, the positioning error is reduced by around 68%, while the percentage is around 74% for the hardware wheeled odometer. In conclusion, the proposed OdoNet can be employed as an untethered pseudo-odometer for vehicle navigation, which can efficiently improve the accuracy and reliability of the positioning in GNSS-denied environments.
翻译:已经证明,测量仪大大提高了全球导航卫星系统/惯性导航系统(GNSS/INS)综合车辆导航系统(GNSS/INS)在受全球导航卫星系统挑战的环境中的准确性。然而,在很多应用中,特别是市场后装置中,超强测量仪是无法进入的。要应用远速协助,而没有硬件轮式气压计,我们提议OdoNet,这是一个单维单维的单维飞动神经网络(CNN)的伪温度模型学习,可以取代轮式气压计。已经进行了专门实验,以核实OdoNet的可行性和稳健性。结果显示,IMU的个性、车辆负荷和道路状况对OdoNet的稳健性和精确性影响不大,而IMU的偏差和不断上升的角可能显著破坏OdoNet。因此,数据清理程序可以有效减轻IMU偏差和升升角度的影响。与仅使用非轨道的轨道定位来改进OdodoNet的不精确性环境相比,在IMFILMLM的定位上,而采用不精确度则采用IMIGML的精确度。