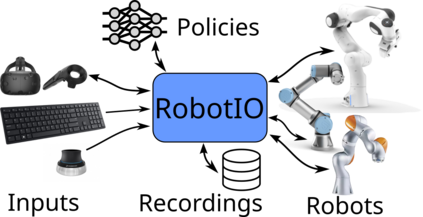
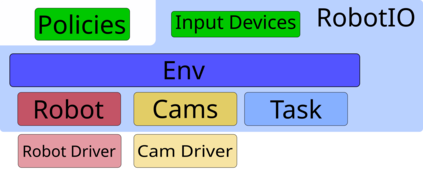
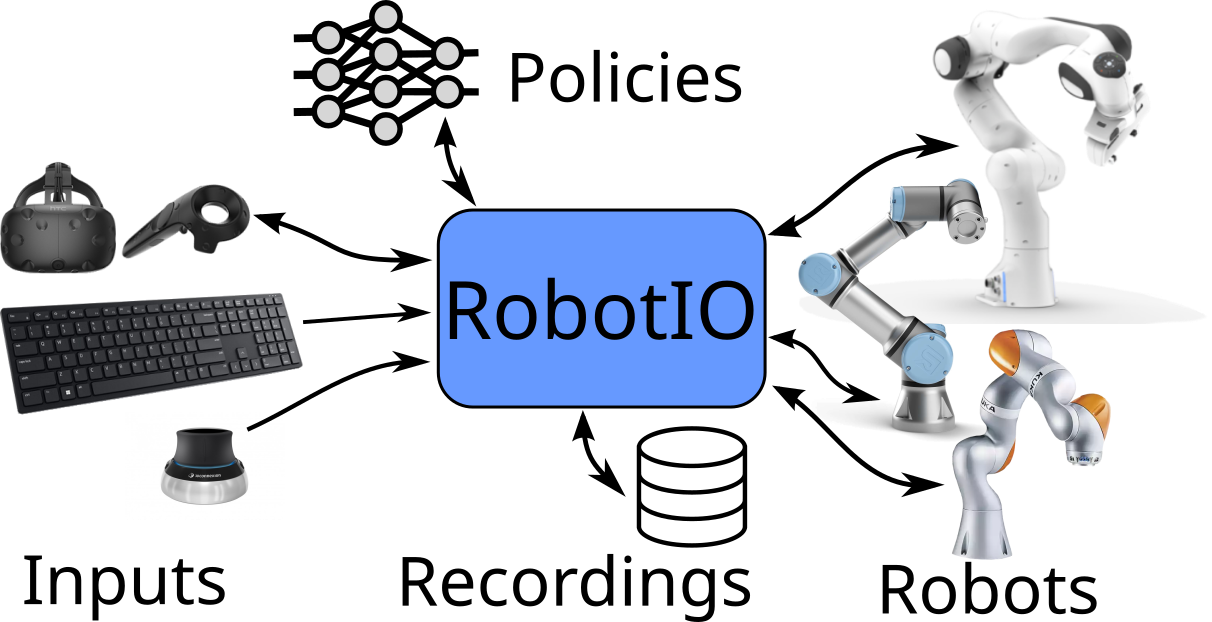
Setting up robot environments to quickly test newly developed algorithms is still a difficult and time consuming process. This presents a significant hurdle to researchers interested in performing real-world robotic experiments. RobotIO is a python library designed to solve this problem. It focuses on providing common, simple, and well structured python interfaces for robots, grippers, and cameras, etc. These are provided with implementations of these interfaces for common hardware. This enables code using RobotIO to be portable across different robot setups. In terms of architecture, RobotIO is designed to be compatible with OpenAI gym environments, as well as ROS; examples of both of these are provided. The library comes together with a number of helpful tools, such as camera calibration scripts and episode recording functionality that further support algorithm development.
翻译:建立机器人环境以快速测试新开发的算法仍是一个困难和耗时的过程。 这给有兴趣进行真实世界机器人实验的研究人员造成了重大障碍。 机器人组织是一个旨在解决这一问题的皮松图书馆。 它侧重于为机器人、 牵引器和相机等提供通用、 简单和结构完善的皮松界面。 这些界面为通用硬件提供了这些界面的安装。 这让使用机器人组织代码能够被移动到不同的机器人设置中。 在建筑方面, 机器人组织的设计与 OpenAI 健身环境以及ROS 兼容; 提供了这两方面的例子。 图书馆与一些有用的工具一起出现, 如相机校准脚本和插件记录功能, 从而进一步支持算法的开发 。