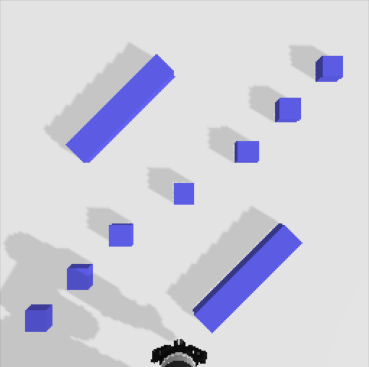
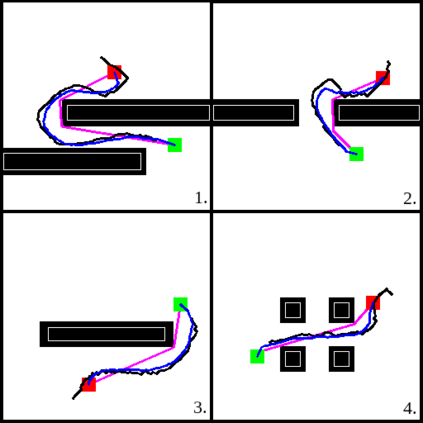
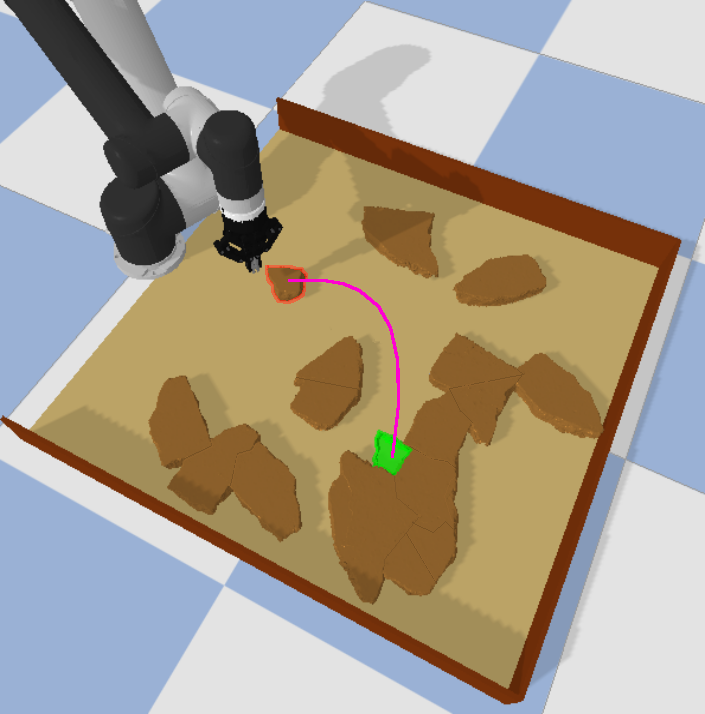
Pushing objects through cluttered scenes is a challenging task, especially when the objects to be pushed have initially unknown dynamics and touching other entities has to be avoided to reduce the risk of damage. In this paper, we approach this problem by applying deep reinforcement learning to generate pushing actions for a robotic manipulator acting on a planar surface where objects have to be pushed to goal locations while avoiding other items in the same workspace. With the latent space learned from a depth image of the scene and other observations of the environment, such as contact information between the end effector and the object as well as distance to the goal, our framework is able to learn contact-rich pushing actions that avoid collisions with other objects. As the experimental results with a six degrees of freedom robotic arm show, our system is able to successfully push objects from start to end positions while avoiding nearby objects. Furthermore, we evaluate our learned policy in comparison to a state-of-the-art pushing controller for mobile robots and show that our agent performs better in terms of success rate, collisions with other objects, and continuous object contact in various scenarios.
翻译:将物体推入杂乱的场景是一项艰巨的任务, 特别是当被推的物体最初具有未知的动态, 并且与其他实体接触时, 必须避免避免损害风险。 在本文中, 我们通过运用深强化学习来为机器人操纵者在平面上产生推力动作来解决这一问题, 而在平面上, 物体必须推向目标位置, 同时避免在同一工作空间中的其他物品。 通过从场景的深度图像和其他环境观测中学习到的潜在空间, 比如终端效果器与对象之间的接触信息, 以及距离目标的距离, 我们的框架能够学习接触力丰富的推力动作, 避免与其他物体发生碰撞。 正如六度自由机器人手臂显示的实验结果一样, 我们的系统能够成功地将物体从起点推向终点位置, 同时避免附近物体。 此外, 我们对照移动机器人的最新推力控制器来评估我们学到的政策, 并显示我们的代理人在成功率、 与其他物体碰撞以及各种情况下的持续物体接触方面表现得更好 。