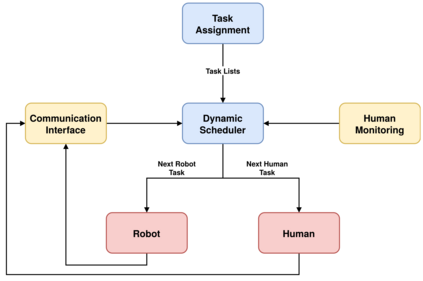
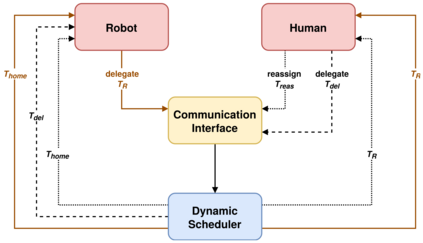
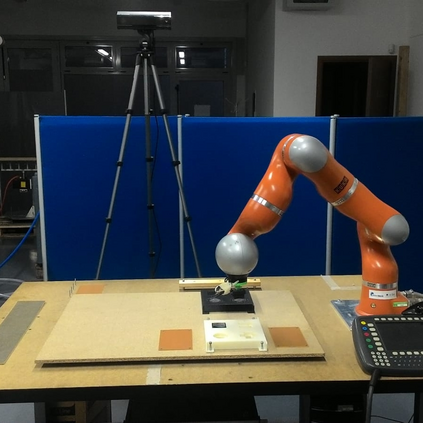
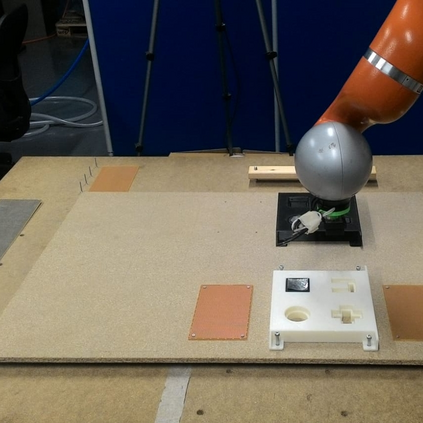
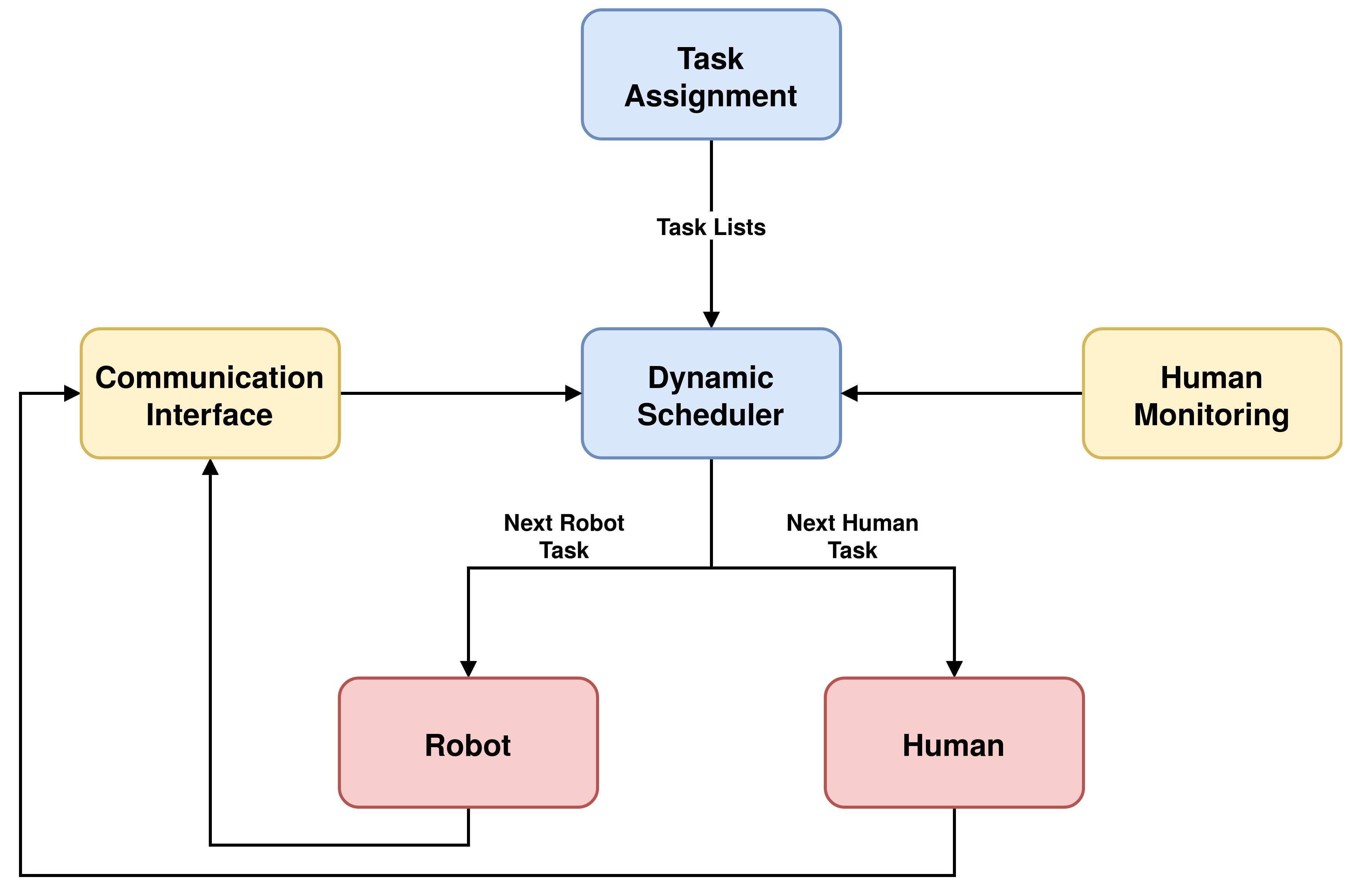
In collaborative robotic cells, a human operator and a robot share the workspace in order to execute a common job, consisting of a set of tasks. A proper allocation and scheduling of the tasks for the human and for the robot is crucial for achieving an efficient human-robot collaboration. In order to deal with the dynamic and unpredictable behavior of the human and for allowing the human and the robot to negotiate about the tasks to be executed, a two layers architecture for solving the task allocation and scheduling problem is proposed. The first layer optimally solves the task allocation problem considering nominal execution times. The second layer, which is reactive, adapts online the sequence of tasks to be executed by the robot considering deviations from the nominal behaviors and requests coming from the human and from robot. The proposed architecture is experimentally validated on a collaborative assembly job.
翻译:在合作机器人细胞中,人类操作员和机器人共享工作空间,以便执行一项共同的任务,包括一系列任务。 适当分配和安排人类和机器人的任务对于实现高效的人类-机器人合作至关重要。 为了应对人类的动态和不可预测性行为,以及允许人类和机器人谈判要执行的任务,提出了解决任务分配和时间安排问题的两层结构。 第一层最理想地解决任务分配问题,考虑名义执行时间。 第二层是反应性,在网上调整机器人执行的任务顺序,考虑偏离名义行为和来自人类和来自机器人的要求。 拟议的结构在合作组装工作中进行了实验性验证。