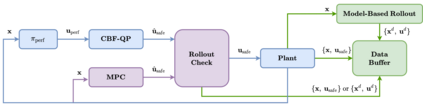
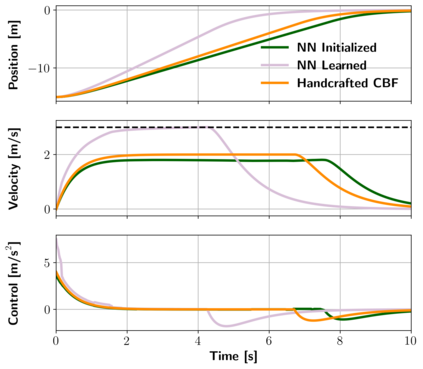
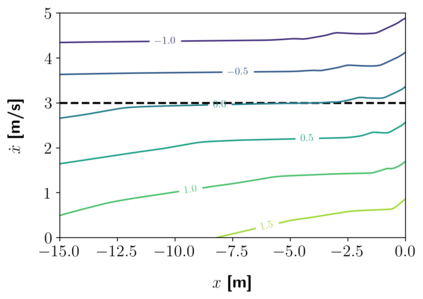
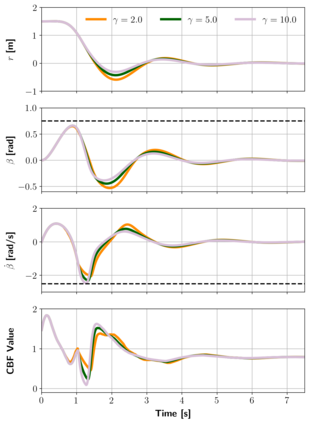
Control barrier functions (CBF) are widely used in safety-critical controllers. However, the construction of valid CBFs is well known to be challenging, especially for nonlinear or non-convex constraints and high relative degree systems. On the other hand, finding a conservative CBF that only recovers a portion of the true safe set is usually possible. In this work, starting from a "conservative" handcrafted control barrier function (HCBF), we develop a method to find a control barrier function that recovers a reasonably larger portion of the safe set. Using a different approach, by incorporating the hard constraints into an optimal control problem, e.g., MPC, we can safely generate solutions within the true safe set. Nevertheless, such an approach is usually computationally expensive and may not lend itself to real-time implementations. We propose to combine the two methods. During training, we utilize MPC to collect safe trajectory data. Thereafter, we train a neural network to estimate the difference between the HCBF and the CBF that recovers a closer solution to the true safe set. Using the proposed approach, we can generate a safe controller that is less conservative and computationally efficient. We validate our approach on three systems: a second-order integrator, ball-on-beam, and unicycle.
翻译:控制屏障功能(CBF)在安全关键控制器中广泛使用。然而,建造有效的 CBF 功能(CBF) 众所周知, 特别是对于非线性或非线性限制以及高相对度的系统来说, 其难度很大。 另一方面, 通常可以找到只回收真正安全套件一部分的保守 CBF 。 在这项工作中, 从“ 保守” 手工制造的控制屏障功能(HCBF) 开始, 我们开发了一种方法来寻找控制屏障功能, 以回收安全套件中相当大的一部分。 使用不同的方法, 将硬性限制纳入一个最佳控制问题, 例如 MPC, 我们可以安全地在真实的安全套件中找到解决方案。 然而, 这种方法通常在计算上昂贵, 可能无法实时实施。 我们提议将这两种方法结合起来。 在培训过程中, 我们使用MPC 收集安全轨迹的功能来估计 HCBFF 和 CBFF 之间的差别。 然后, 我们训练一个神经网络, 来估计真正安全套件的较近的解决方案。 使用拟议方法, 我们可以产生一种安全周期的安全控制器, 我们在三个系统上, 我们进行较保守和高效的系统。