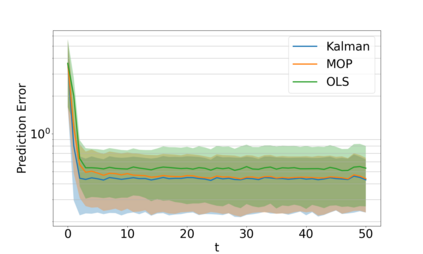
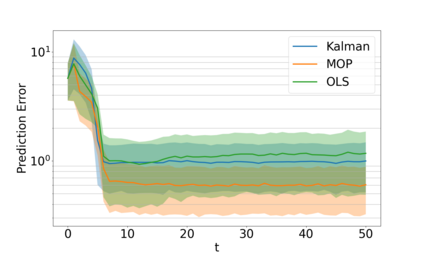
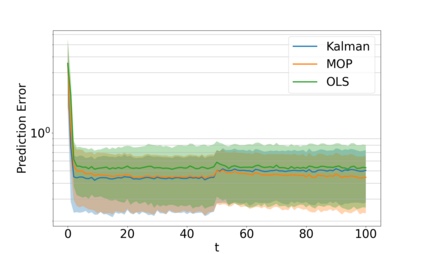
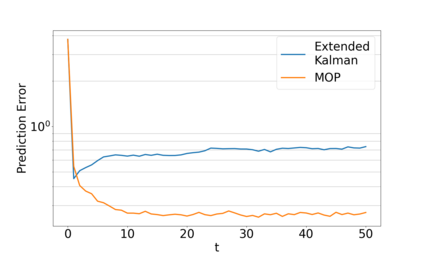
Transformers have demonstrated remarkable success in natural language processing; however, their potential remains mostly unexplored for problems arising in dynamical systems. In this work, we investigate the optimal output estimation problem using transformers, which generate output predictions using all the past ones. We train the transformer using various systems drawn from a prior distribution and then evaluate its performance on previously unseen systems from the same distribution. As a result, the obtained transformer acts like a prediction algorithm that learns in-context and quickly adapts to and predicts well for different systems - thus we call it meta-output-predictor (MOP). MOP matches the performance of the optimal output estimator, based on Kalman filter, for most linear dynamical systems even though it does not have access to a model. We observe via extensive numerical experiments that MOP also performs well in challenging scenarios with non-i.i.d. noise, time-varying dynamics, and nonlinear dynamics like a quadrotor system with unknown parameters. To further support this observation, in the second part of the paper, we provide statistical guarantees on the performance of MOP and quantify the required amount of training to achieve a desired excess risk during test-time. Finally, we point out some limitations of MOP by identifying two classes of problems MOP fails to perform well, highlighting the need for caution when using transformers for control and estimation.
翻译:暂无翻译