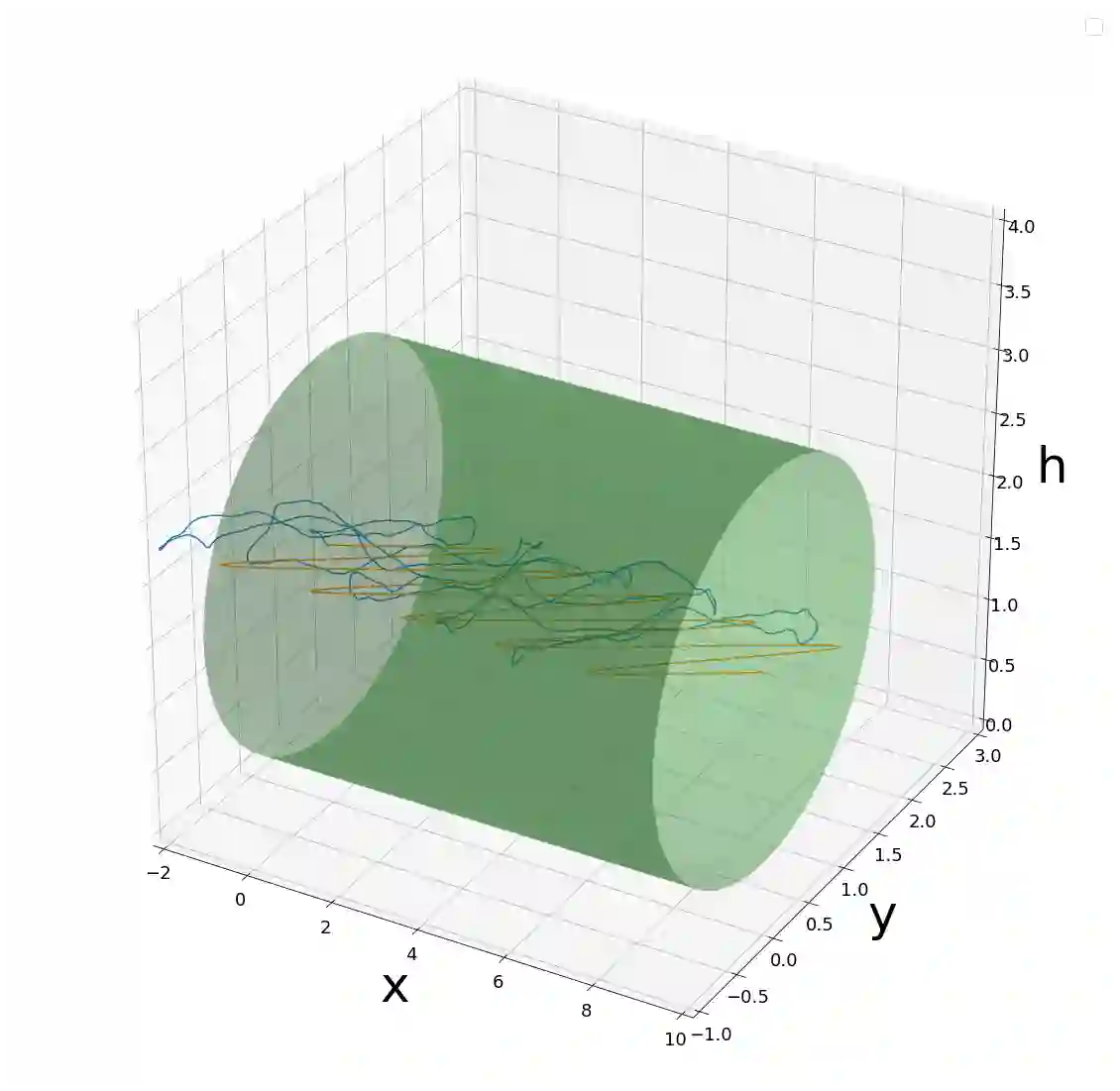
This paper introduces a method for effectively controlling the movement of an Unmanned Aerial Vehicle (UAV) within a tunnel. The primary challenge of this problem lies in the UAV's exposure to nonlinear distance-dependent torques and forces generated by the tunnel walls, along with the need to operate safely within a defined region while in close proximity to these walls. To address this problem, the paper proposes the implementation of a Model Predictive Control (MPC) framework with constraints based on Control Barrier Function (CBF). The paper approaches the issue in two distinct ways; first, by maintaining a safe distance from the tunnel walls to avoid the effects of both the walls and ceiling, and second, by minimizing the distance from the walls to effectively manage the nonlinear forces associated with close proximity tasks. Finally, the paper demonstrates the effectiveness of its approach through testing on simulation for various close proximity trajectories with the realistic model of aerodynamic disturbances due to the proximity of the ceiling and boundary walls.
翻译:本文提出了一种方法来有效地控制无人飞行器(UAV)在隧道内的运动。这个问题的主要挑战在于UAV暴露于与隧道墙壁产生的非线性距离依赖扭矩和力量中,同时需要在接近这些墙壁时安全地操作。为了解决这个问题,本文提出了基于控制壁函数(CBF)的约束的模型预测控制(MPC)框架的实现。本文采用两种不同的方法来解决这个问题;首先,通过保持与隧道墙壁之间的安全距离来避免墙壁和天花板的影响,其次,通过最小化与墙壁之间的距离来有效地管理与密集空间任务相关的非线性力量。最后,本文通过对各种接近距离轨迹的模拟测试,展示了其方法的有效性,并考虑了由于接近天花板和边界墙壁而产生的现实模型的空气动力干扰。