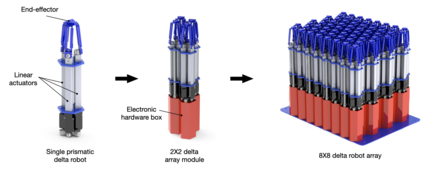
This paper presents a new type of distributed dexterous manipulators: delta arrays. Each delta array consists of a grid of linearly-actuated delta robots with compliant 3D-printed parallelogram links. These arrays can be used to perform planar transportation tasks, similar to smart conveyors. However, the deltas' additional degrees of freedom also afford a wide range of out-of-plane manipulations, as well as prehensile manipulations between sets of deltas. A delta array thus affords a wide range of distributed manipulation strategies. In this paper, we present the design of the delta arrays, including the individual deltas, a modular array structure, and distributed communication and control. We also construct and evaluate an 8x8 array using the proposed design. Our evaluations show that the resulting 192 DoF robot is capable of performing various coordinated distributed manipulations of a variety of objects, including translation, alignment, and prehensile squeezing.
翻译:本文展示了一种新型分布式三角形操纵器的新类型: 三角形阵列。 每个三角体阵列包含一个有符合 3D 打印的平行图象链接的线性活性三角形机器人网格。 这些阵列可用于执行平面运输任务, 类似于智能传送器。 然而, 三角体的额外自由度也提供了各种各样的飞机外操纵, 以及三角形各组之间的先发性操纵。 一个三角体阵列因此提供了范围广泛的分布式操纵策略。 在本文件中, 我们展示了三角体阵列的设计, 包括单个三角体、 模块阵列结构以及分布式通信和控制。 我们还利用拟议的设计构建和评估了 8x8 阵列。 我们的评估显示, 由此形成的 192 DoF 机器人能够对各种天体进行各种协调的分布式操纵, 包括翻译、 校正和 前置式阵列阵列。