
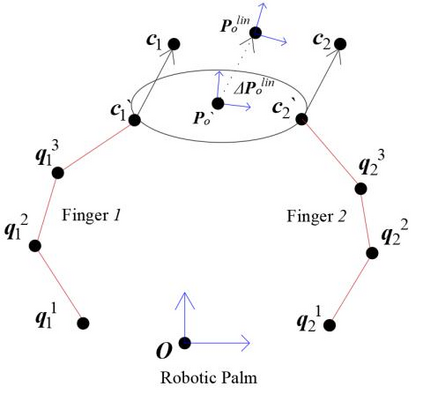
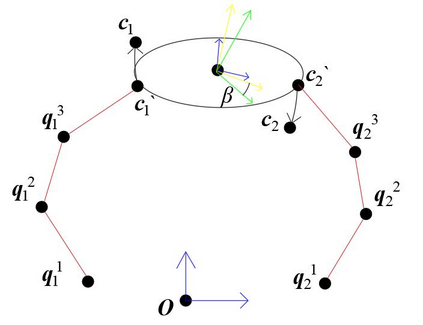
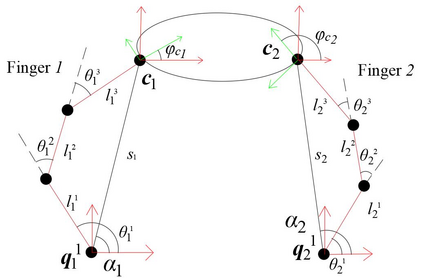
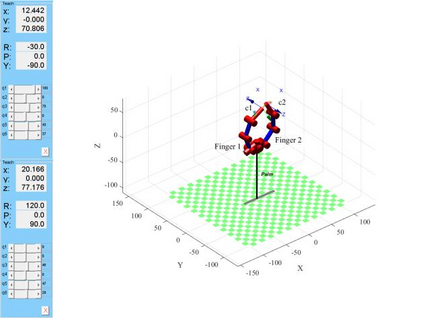
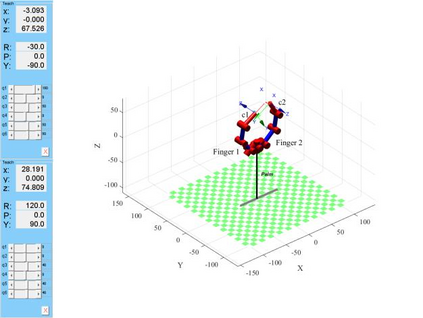
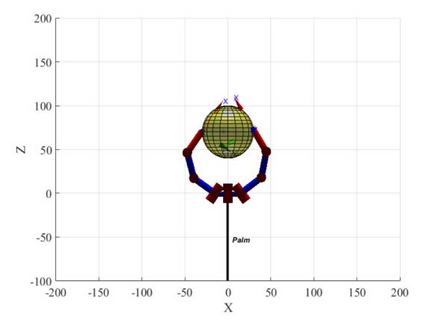
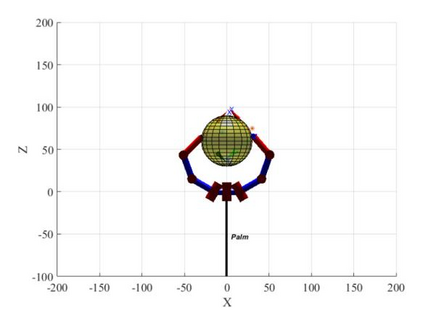
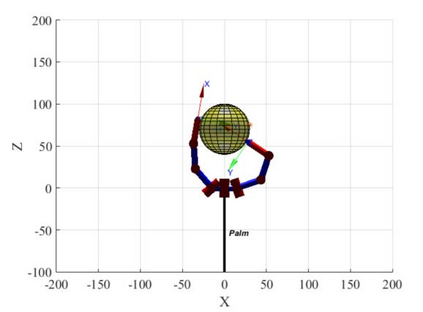
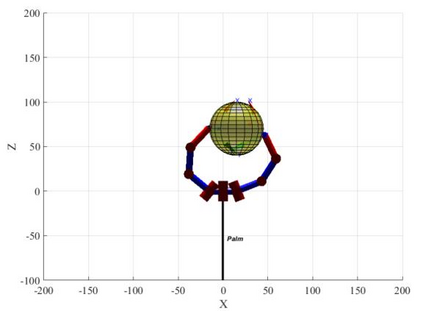
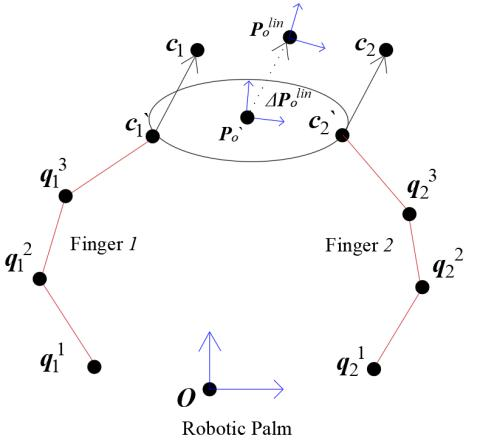
This paper addresses the planar finger kinematics for seeking optimized manipulation strategies. The first step is to model based on geometric features of linear and rotation motion so that the robot can select the fingers configurations. This kinematic model considers the motion between hands and object. Based on 2-finger manipulation cases, this model can output the strategies for bimanual manipulation. For executing strategies, the second step is to seek the appropriate values of finger joints according to the ending orientation of fingers. The simulation shows that the computed solutions can complete the relative rotation and linear motion of unknown objects.
翻译:暂无翻译
相关内容

ACM/IEEE第23届模型驱动工程语言和系统国际会议,是模型驱动软件和系统工程的首要会议系列,由ACM-SIGSOFT和IEEE-TCSE支持组织。自1998年以来,模型涵盖了建模的各个方面,从语言和方法到工具和应用程序。模特的参加者来自不同的背景,包括研究人员、学者、工程师和工业专业人士。MODELS 2019是一个论坛,参与者可以围绕建模和模型驱动的软件和系统交流前沿研究成果和创新实践经验。今年的版本将为建模社区提供进一步推进建模基础的机会,并在网络物理系统、嵌入式系统、社会技术系统、云计算、大数据、机器学习、安全、开源等新兴领域提出建模的创新应用以及可持续性。
官网链接:http://www.modelsconference.org/
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
Arxiv
0+阅读 · 2024年2月24日


相关VIP内容
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
相关资讯
相关论文
Arxiv
0+阅读 · 2024年2月24日