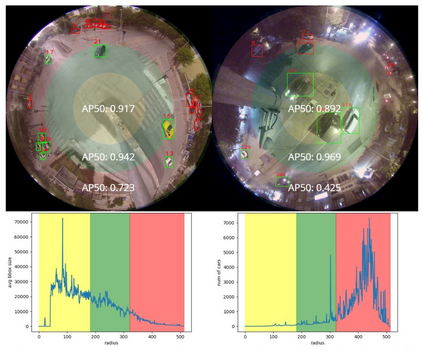
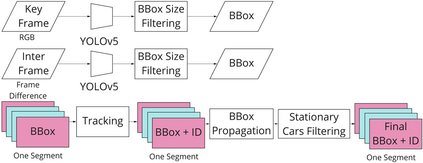
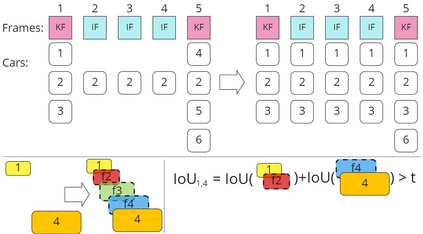
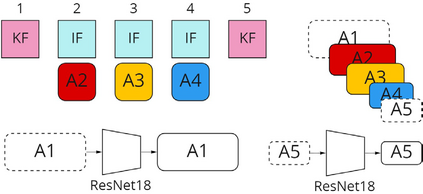
We design a fast car detection and tracking algorithm for traffic monitoring fisheye video mounted on crossroads. We use ICIP 2020 VIP Cup dataset and adopt YOLOv5 as the object detection base model. The nighttime video of this dataset is very challenging, and the detection accuracy (AP50) of the base model is about 54%. We design a reliable car detection and tracking algorithm based on the concept of bounding box propagation among frames, which provides 17.9 percentage points (pp) and 6.2 pp. accuracy improvement over the base model for the nighttime and daytime videos, respectively. To speed up, the grayscale frame difference is used for the intermediate frames in a segment, which can double the processing speed.
翻译:我们设计了一个快速的汽车探测和跟踪算法,用于交通监测在十字路口安装的鱼眼视频。我们使用ICIP 2020 VIP Viet Cup数据集,并采用YOLOv5作为物体探测基准模型。该数据集的夜间视频非常具有挑战性,基准模型的检测准确度(AP50)约为54%。我们设计了一个可靠的汽车探测和跟踪算法,其依据是各框架之间捆绑盒传播的概念,分别提供了17.9个百分点(pp)和6.2pp。精确度比夜间和白天视频的基准模型提高了17.9个百分点。为了加快速度,对中间框架段使用了灰度框架差异,这段段段段段的中间框架可以使处理速度增加一倍。