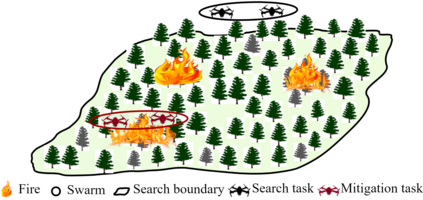
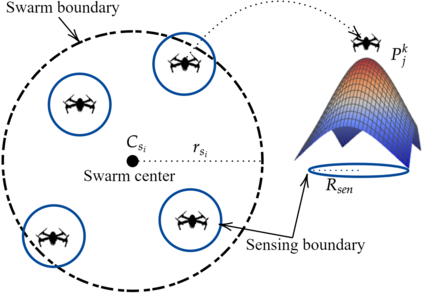
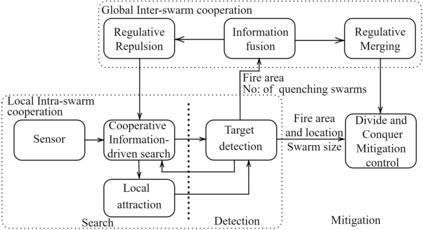
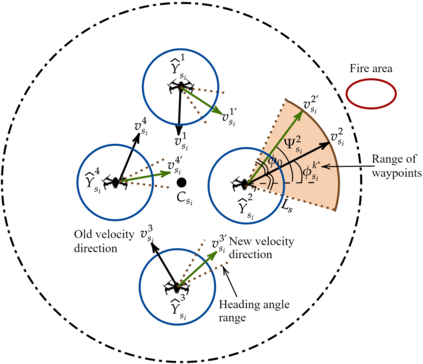
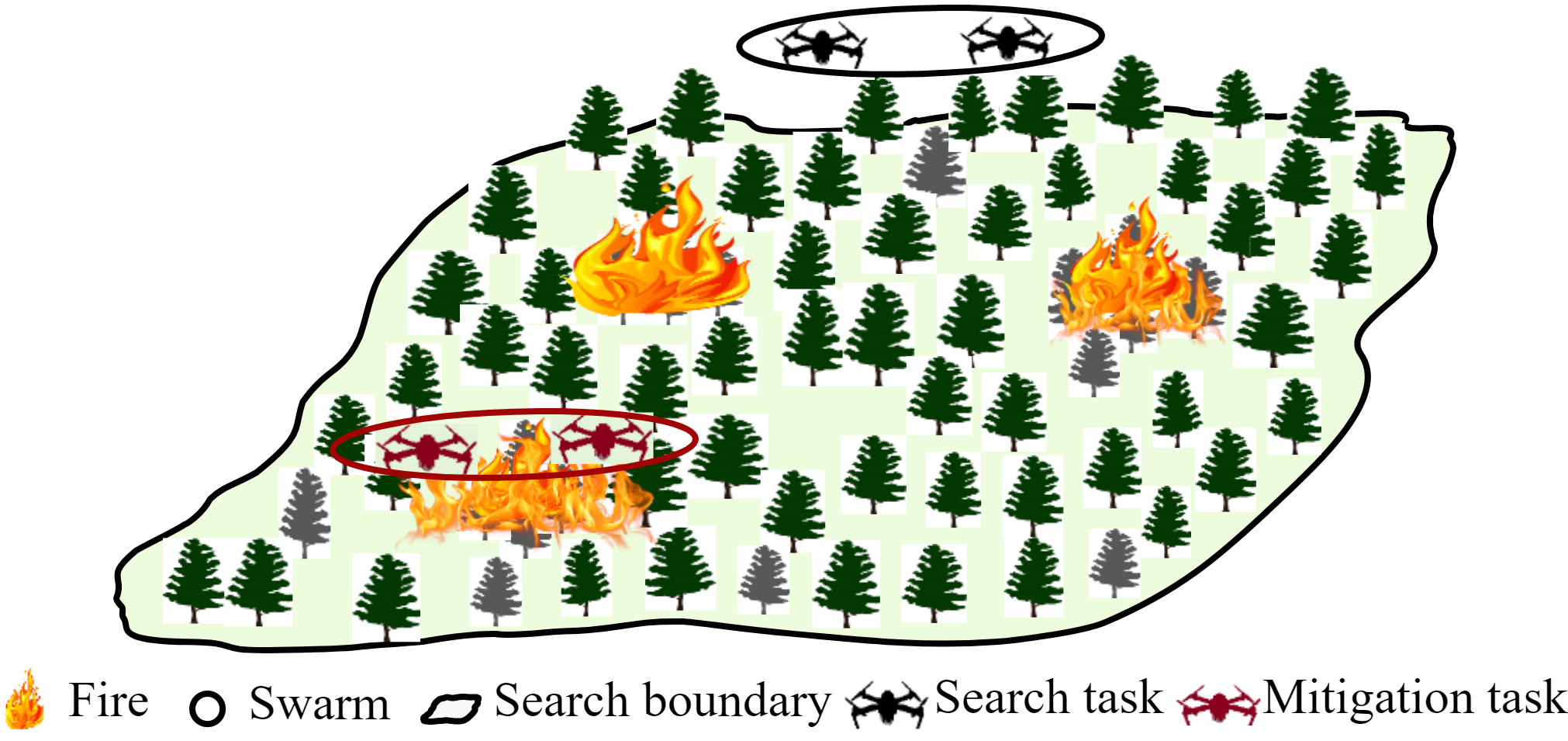
In this paper, the Multi-Swarm Cooperative Information-driven search and Divide and Conquer mitigation control (MSCIDC) approach is proposed for faster detection and mitigation of forest fire by reducing the loss of biodiversity, nutrients, soil moisture, and other intangible benefits. A swarm is a cooperative group of Unmanned Aerial Vehicles (UAVs) that fly together to search and quench the fire effectively. The multi-swarm cooperative information-driven search uses a multi-level search comprising cooperative information-driven exploration and exploitation for quick/accurate detection of fire location. The search level is selected based on the thermal sensor information about the potential fire area. The dynamicity of swarms, aided by global regulative repulsion and merging between swarms, reduces the detection and mitigation time compared to the existing methods. The local attraction among the members of the swarm helps the non-detector members to reach the fire location faster, and divide-and-conquer mitigation control ensures a non-overlapping fire sector allocation for all members quenching the fire. The performance of MSCIDC has been compared with different multi-UAV methods using a simulated environment of pine forest. The performance clearly shows that MSCIDC mitigates fire much faster than the multi-UAV methods. The Monte-Carlo simulation results indicate that the proposed method reduces the average forest area burnt by $65\%$ and mission time by $60\%$ compared to the best result case of the multi-UAV approaches, guaranteeing a faster and successful mission.
翻译:在本文中,提议采用多温合作信息驱动搜索和分化及征服减缓控制(MSCIDC)方法,通过减少生物多样性、养分、土壤水分和其他无形惠益的丧失,更快地探测和减缓森林火灾。群群是一个无人驾驶航空飞行器(UAVs)合作小组,它们一起飞行,以搜索和有效灭火。多温合作信息驱动搜索使用多层次搜索,包括合作信息驱动探索和利用,快速/准确探测火灾地点。搜索水平是根据关于潜在火灾区的热传感器信息选择的。在全球变暖、营养养分、土壤水分和其他无形惠益的丧失下,加快探测和减缓森林火灾的速度。多温合作搜索组成员在当地的吸引有助于非探测人员更快地到达火灾地点,分解和消化对火灾地点进行快速/准确的检测。根据MSCIDC公司案例的动态动态,借助全球抗冲退缩和暖流之间的合并,减少探测和缓解时间,通过对稳定-红心-红心-红心-红心-红心-红心-红-红心-红心-红心-红心-平-比用不同的模拟方法,明显地展示一种稳定-降低多度方法,以更快地的进度方法,以降低/降低/降低/降低/降成。