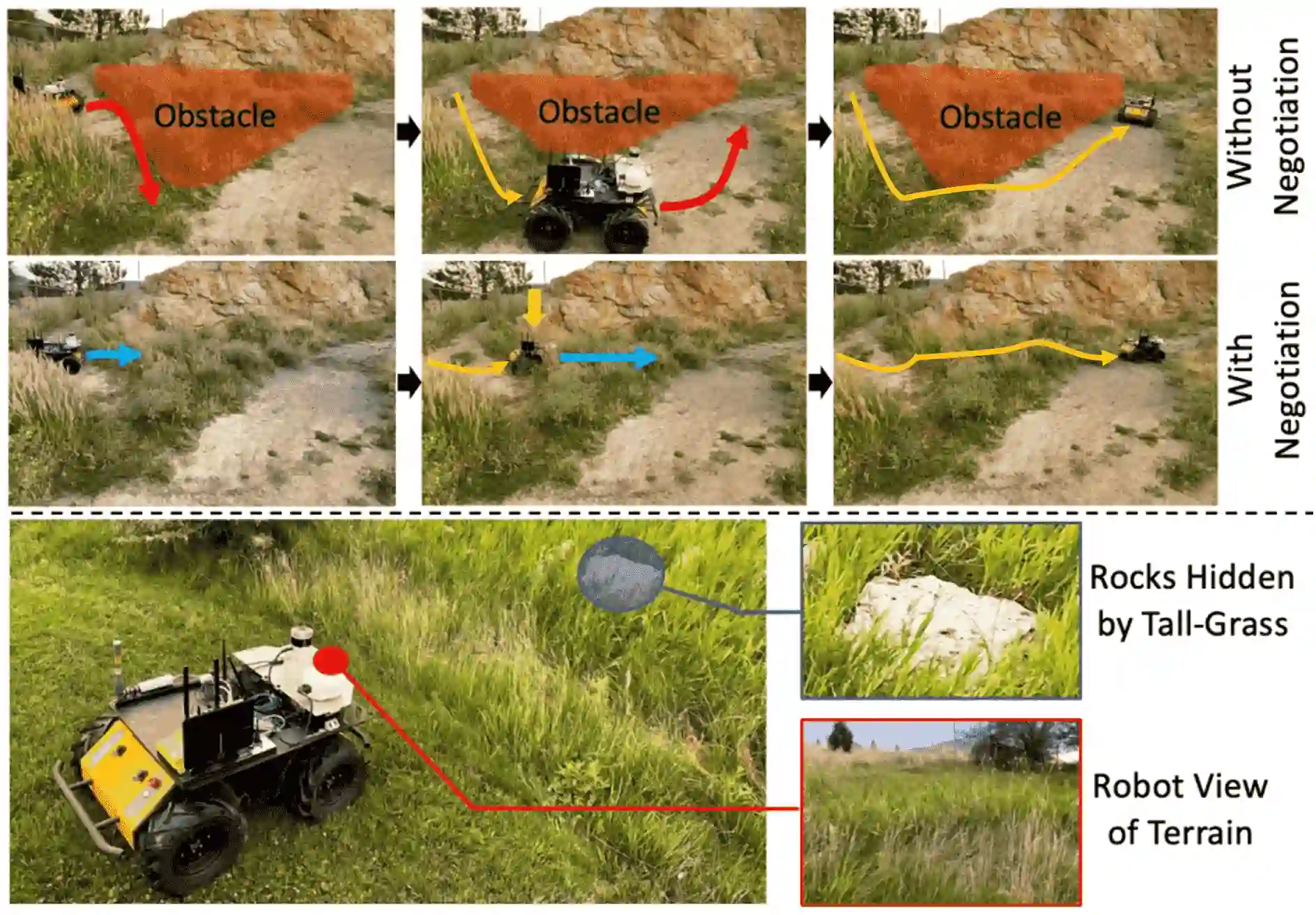
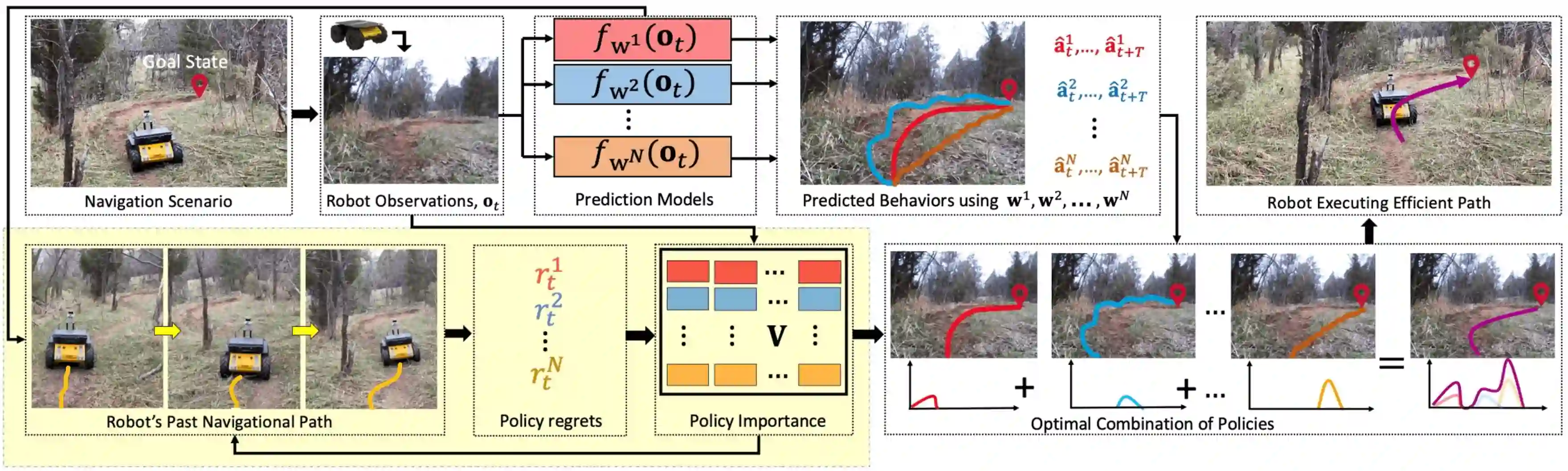
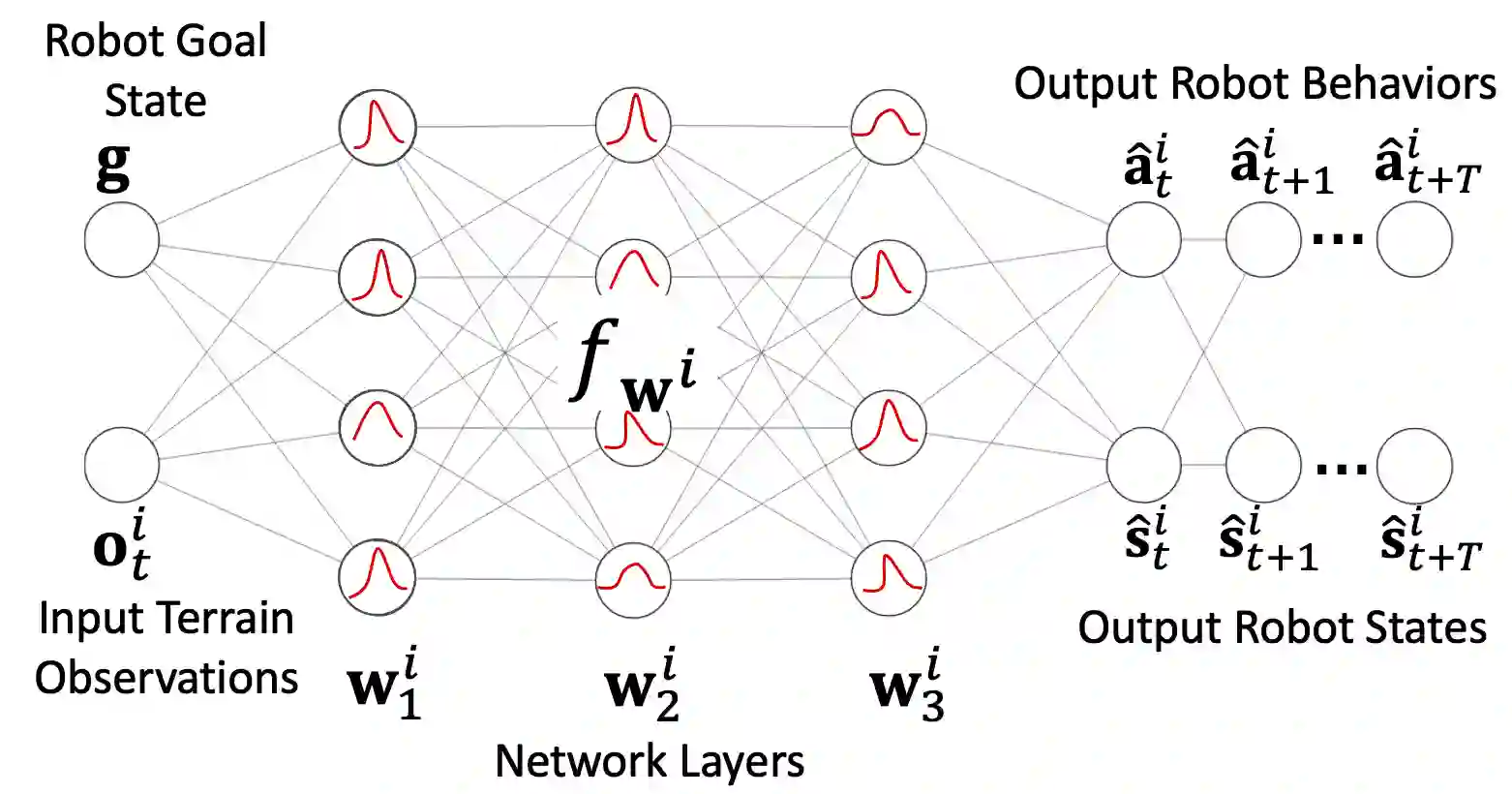
When robots operate in real-world off-road environments with unstructured terrains, the ability to adapt their navigational policy is critical for effective and safe navigation. However, off-road terrains introduce several challenges to robot navigation, including dynamic obstacles and terrain uncertainty, leading to inefficient traversal or navigation failures. To address these challenges, we introduce a novel approach for adaptation by negotiation that enables a ground robot to adjust its navigational behaviors through a negotiation process. Our approach first learns prediction models for various navigational policies to function as a terrain-aware joint local controller and planner. Then, through a new negotiation process, our approach learns from various policies' interactions with the environment to agree on the optimal combination of policies in an online fashion to adapt robot navigation to unstructured off-road terrains on the fly. Additionally, we implement a new optimization algorithm that offers the optimal solution for robot negotiation in real-time during execution. Experimental results have validated that our method for adaptation by negotiation outperforms previous methods for robot navigation, especially over unseen and uncertain dynamic terrains.
翻译:当机器人在现实世界外的地形上运行时,调整其导航政策的能力对于有效和安全航行至关重要。然而,越野地形给机器人导航带来若干挑战,包括动态障碍和地形不确定性,导致低效率的穿航或航行失败。为了应对这些挑战,我们引入了一种新的调整办法,通过谈判使地面机器人能够调整其导航行为。我们的方法首先学习各种导航政策的预测模型,以便发挥地形观察的联合地方控制器和规划器的作用。然后,通过新的谈判进程,我们的方法从各种政策与环境的互动中学习,以商定将机器人导航调整到非结构的飞地的最佳在线政策组合。此外,我们实施了一种新的优化算法,为机器人在实际执行期间的实时谈判提供了最佳解决方案。实验结果证实,我们通过谈判的适应方法优于以往的机器人导航方法,特别是超视像和不确定的动态地形。