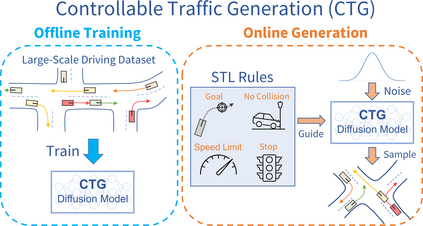
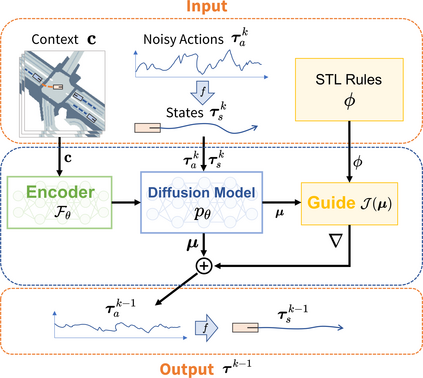
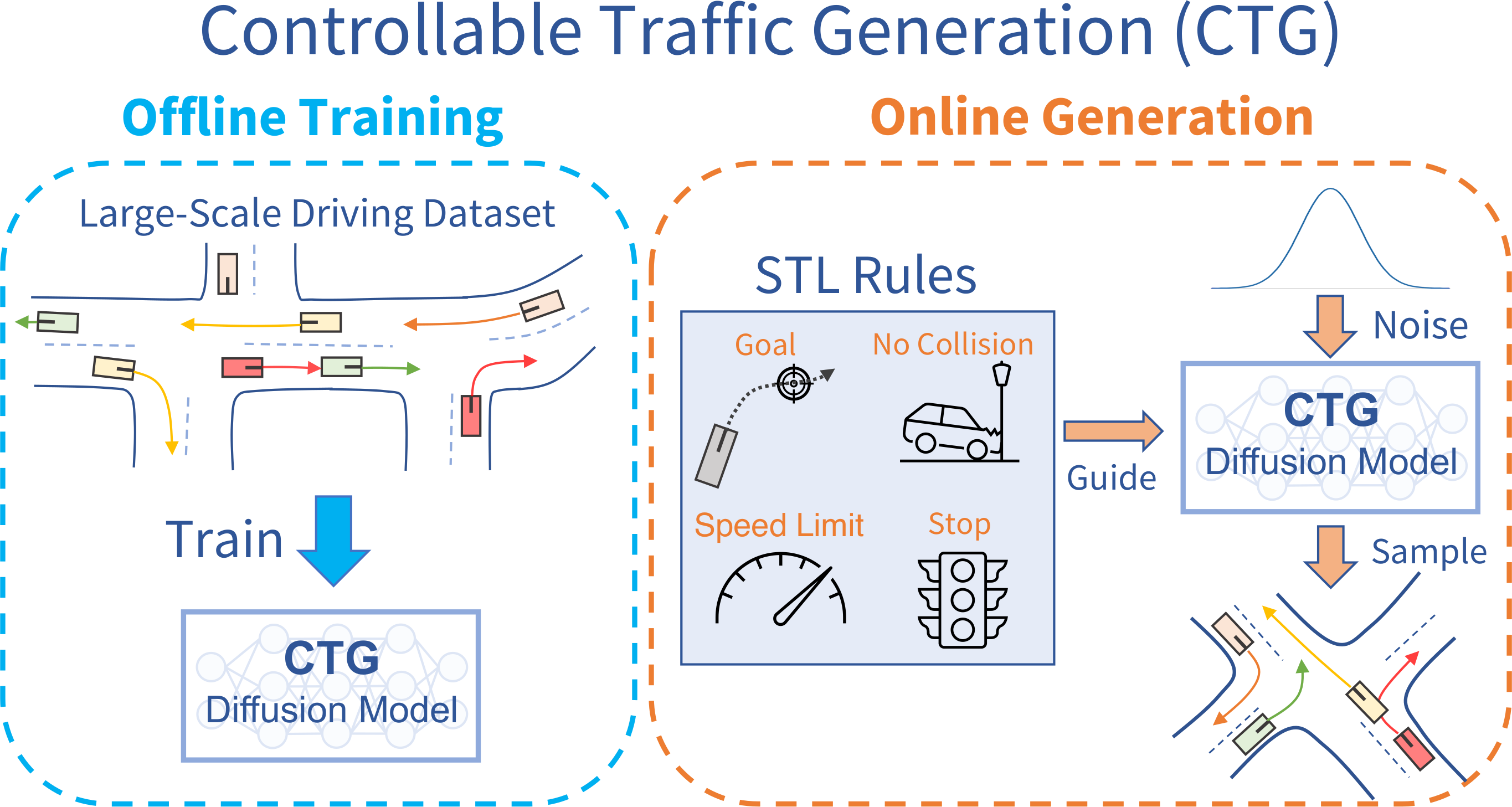
Controllable and realistic traffic simulation is critical for developing and verifying autonomous vehicles. Typical heuristic-based traffic models offer flexible control to make vehicles follow specific trajectories and traffic rules. On the other hand, data-driven approaches generate realistic and human-like behaviors, improving transfer from simulated to real-world traffic. However, to the best of our knowledge, no traffic model offers both controllability and realism. In this work, we develop a conditional diffusion model for controllable traffic generation (CTG) that allows users to control desired properties of trajectories at test time (e.g., reach a goal or follow a speed limit) while maintaining realism and physical feasibility through enforced dynamics. The key technical idea is to leverage recent advances from diffusion modeling and differentiable logic to guide generated trajectories to meet rules defined using signal temporal logic (STL). We further extend guidance to multi-agent settings and enable interaction-based rules like collision avoidance. CTG is extensively evaluated on the nuScenes dataset for diverse and composite rules, demonstrating improvement over strong baselines in terms of the controllability-realism tradeoff.
翻译:典型的基于超光速的交通模式提供灵活的控制,使车辆遵循特定的轨迹和交通规则。另一方面,数据驱动的方法产生现实和人性化的行为,改进从模拟交通向现实世界交通的转移。然而,据我们所知,没有一种交通模式既具有可控性和现实性,也没有一种交通模式既具有可控性和现实性。在这项工作中,我们为可控交通生成开发了一个有条件的传播模式(CTG),允许用户在测试时控制轨迹的预期特性(例如达到一个目标或遵循一个速度限制),同时通过强制动态保持现实主义和物理可行性。关键的技术理念是利用从扩散模型和不同逻辑的最新进展,引导生成的轨迹符合使用信号时间逻辑(STL)确定的规则。我们进一步向多试剂环境提供指导,并促成以互动为基础的规则,如避免碰撞。CTG对用于多样化和综合规则的nuScenoffse数据集进行了广泛评价,表明控制-现实贸易的强基线有所改进。