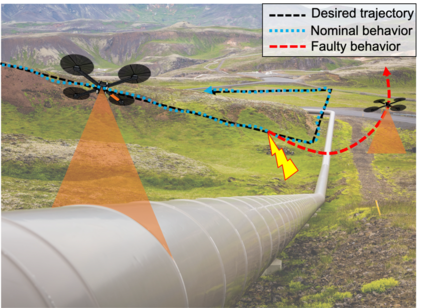
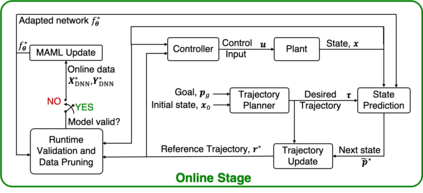
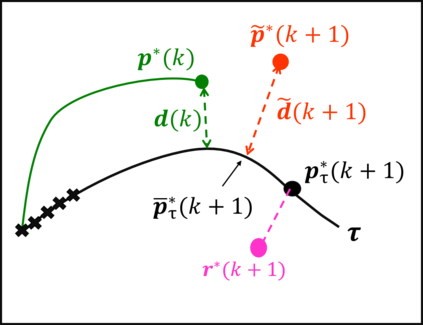
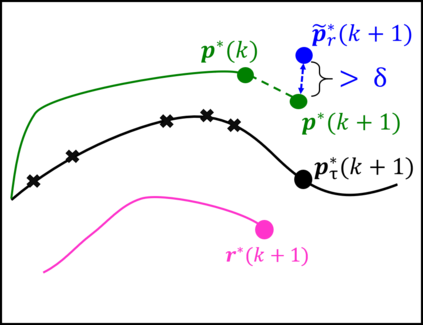
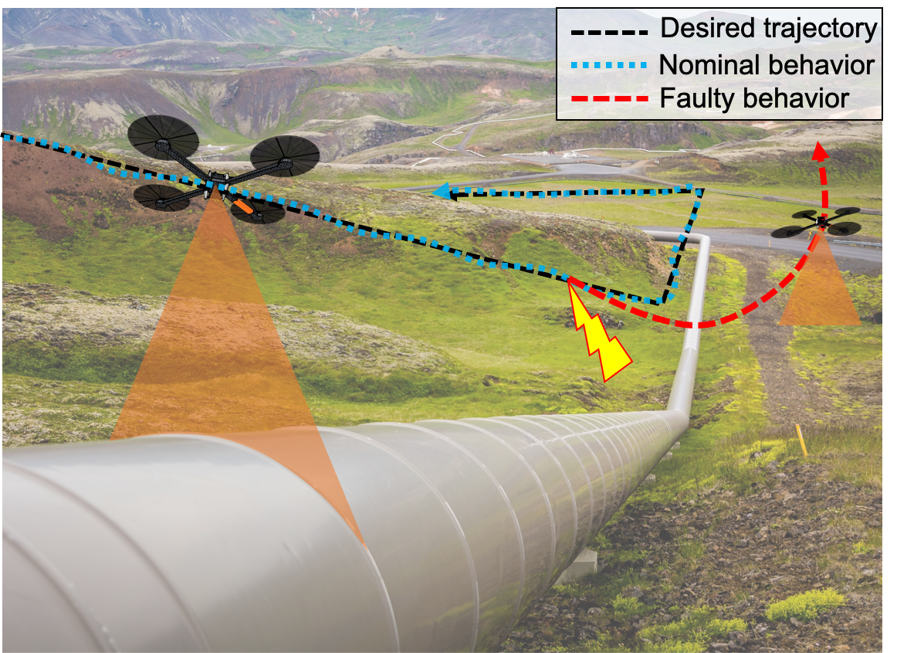
Due to changes in model dynamics or unexpected disturbances, an autonomous robotic system may experience unforeseen challenges during real-world operations which may affect its safety and intended behavior: in particular actuator and system failures and external disturbances are among the most common causes of degraded mode of operation. To deal with this problem, in this work, we present a meta-learning-based approach to improve the trajectory tracking performance of an unmanned aerial vehicle (UAV) under actuator faults and disturbances which have not been previously experienced. Our approach leverages meta-learning to adapt the system's model at runtime to make accurate predictions about the system's future state. A runtime monitoring and validation technique is proposed to decide when the system needs to adapt its model by considering a data pruning procedure for efficient learning. Finally the desired trajectory is adapted based on future predictions by borrowing robust control logic to make the system track the original and desired path without needing to access the system's controller. The proposed framework is applied and validated in both simulations and experiments on a faulty UAV navigation case study demonstrating a drastic increase in tracking performance.
翻译:由于模型动态的变化或意外的扰动,自主机器人系统在实际操作期间可能遇到无法预见的挑战,可能影响其安全和预期行为:特别是动力器和系统故障以及外部扰动是造成运行模式退化的最常见原因之一。为了解决这一问题,我们在这项工作中提出了一个基于元学习的办法,以改进在驱动器故障和扰动之前未曾经历的驱动器下无人驾驶飞行器(UAV)的轨迹跟踪性能。我们的方法利用元学习在运行时调整系统模型,对系统的未来状态作出准确预测。建议采用运行时间监测和验证技术,以决定系统何时需要调整其模型,为此考虑数据调整程序,以便高效学习。最后,根据未来的预测调整了理想的轨迹,通过借用稳健的控制逻辑,使系统跟踪原始和理想的路径而无需访问系统的控制器。拟议框架在对错误的UAV导航案例研究的模拟和实验中应用和验证,显示跟踪性能的急剧提高。