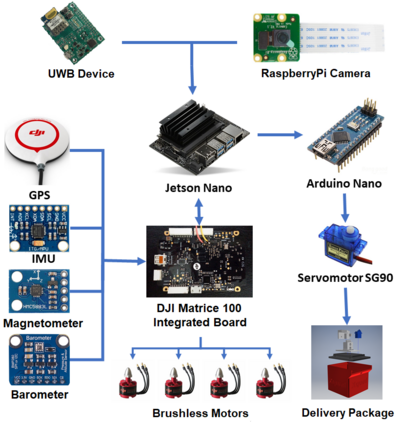
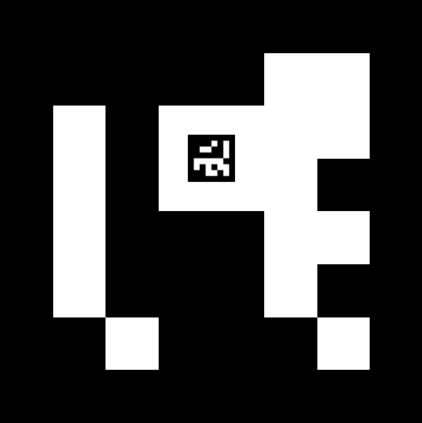
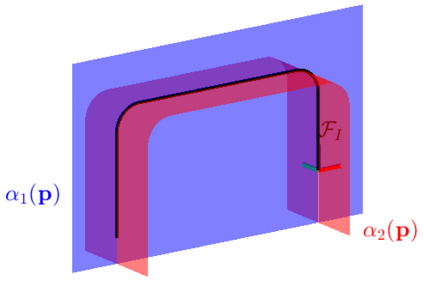
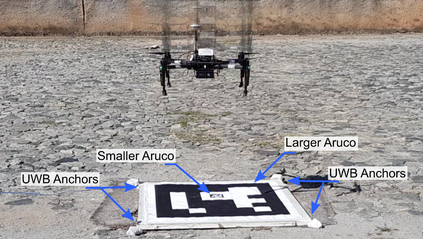
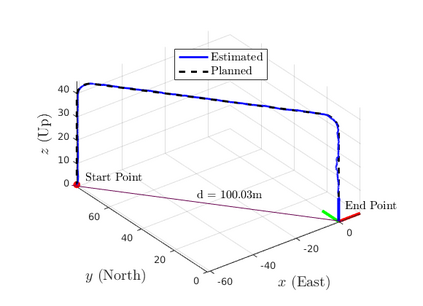
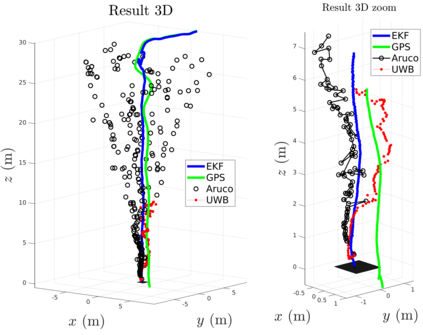
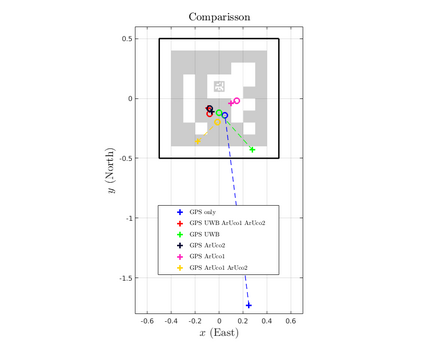
The use of delivery services is an increasing trend worldwide, further enhanced by the COVID pandemic. In this context, drone delivery systems are of great interest as they may allow for faster and cheaper deliveries. This paper presents a navigation system that makes feasible the delivery of parcels with autonomous drones. The system generates a path between a start and a final point and controls the drone to follow this path based on its localization obtained through GPS, 9DoF IMU, and barometer. In the landing phase, information of poses estimated by a marker (ArUco) detection technique using a camera, ultra-wideband (UWB) devices, and the drone's software estimation are merged by utilizing an Extended Kalman Filter algorithm to improve the landing precision. A vector field-based method controls the drone to follow the desired path smoothly, reducing vibrations or harsh movements that could harm the transported parcel. Real experiments validate the delivery strategy and allow to evaluate the performance of the adopted techniques. Preliminary results state the viability of our proposal for autonomous drone delivery.
翻译:在着陆阶段,使用照相机、超广频带(UWB)装置的标记探测技术估计成份的信息,以及无人机的软件估算,通过使用扩展的Kalman过滤算法来提高着陆精确度,使无人机能够顺利地走所希望的道路,减少振动或可能损害运输包裹的严酷移动。 真正的实验验证了交付战略,并能够评价所采用的技术的性能。 初步结果说明我们关于自动无人机交付的建议的可行性。