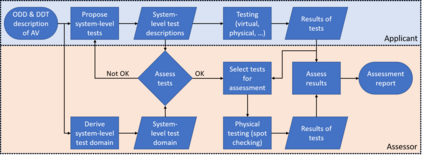
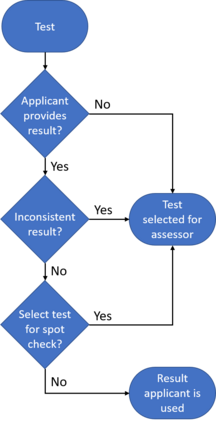
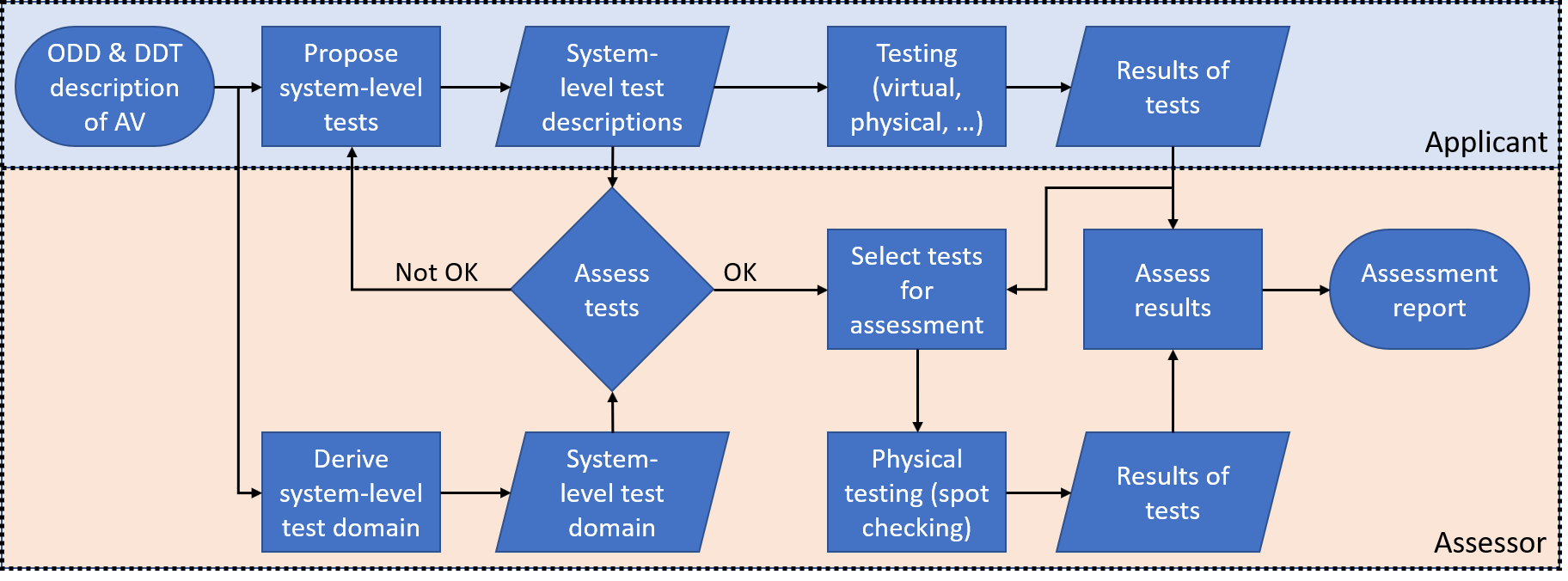
The development of Autonomous Vehicles (AVs) has made significant progress in the last years. An important aspect in the development of AVs is the assessment of their safety. New approaches need to be worked out. Among these, real-world scenario-based assessment is widely supported by many players in the automotive field. Scenario-based assessment allows for using virtual simulation tools in addition to physical tests, such as on a test track, proving ground, or public road. We propose a procedure for real-world scenario-based road-approval assessment considering three stakeholders: the applicant, the assessor, and the (road or vehicle) authority. The challenges are as follows. Firstly, the tests need to be tailored to the operational design domain (ODD) and dynamic driving task (DDT) description of the AV. Secondly, it is assumed that the applicant does not want to disclose all of the detailed test results because of proprietary or confidential information contained in these results. Thirdly, due to the complex ODD and DDT, many test scenarios are required to obtain sufficient confidence in the assessment of the AV. Consequently, it is assumed that due to limited resources, it is infeasible for the assessor to conduct all (physical) tests. We propose a systematic approach for determining the tests that are based on the requirements set by the authority and the AV's ODD and DDT description, such that the tests are tailored to the applicable ODD and DDT. Each test comes with metrics that enables the applicant to provide a performance rating of the AV for each of the tests. By only providing a performance rating for each test, the applicant does not need to disclose the details of the test results. In our proposed procedure, the assessor only conducts a limited number of tests. The main purpose of these tests is to verify the fidelity of the results provided by the applicant.
翻译:过去几年来,自动机动车辆(AV)的开发取得了显著进展。AV发展的一个重要方面是评估其安全性。需要制定新的方法。其中,基于真实世界情景的评估得到了汽车场许多球员的广泛支持。基于情景的评估允许在物理测试之外使用虚拟模拟工具,例如在测试轨道、地面或公共道路上进行模拟测试。我们提议了一个基于真实世界情景的道路批准评估程序,其中考虑到三个利益攸关方:申请人、评估员和(道路或车辆)权威。挑战如下。首先,测试需要根据操作设计域(ODDD)和动态驱动任务(DDT)进行定制。第二,假定申请人不愿意披露所有详细的测试结果,如测试结果中包含的专有性或机密信息。第三,由于ODDD和滴滴涕的复杂性,许多测试情景需要获得对AV评估的充分信心。因此,假设由于有限的资源,每项测试都需要根据操作设计域(ODDDT)和动态驱动的测试结果进行实时测试。我们提出的每项测试要求都是根据测试的系统测试结果进行。我们提出的测试的测试要求,根据测试结果,我们提出的所有测试的测试的测试要求必须根据测试的准确性测试结果进行。我们提出的标准进行。