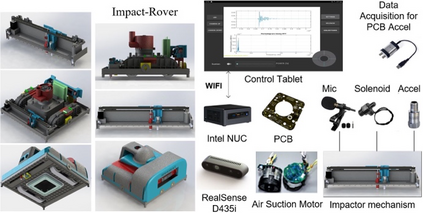
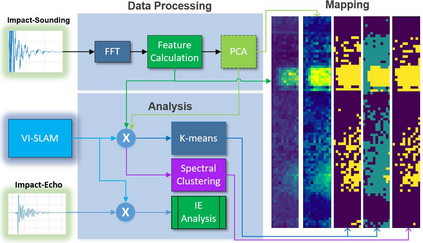
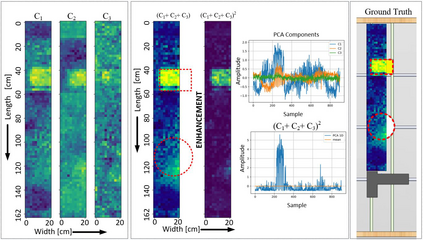
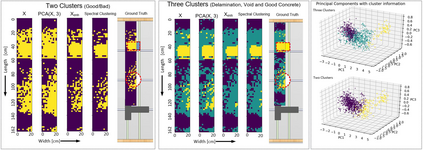
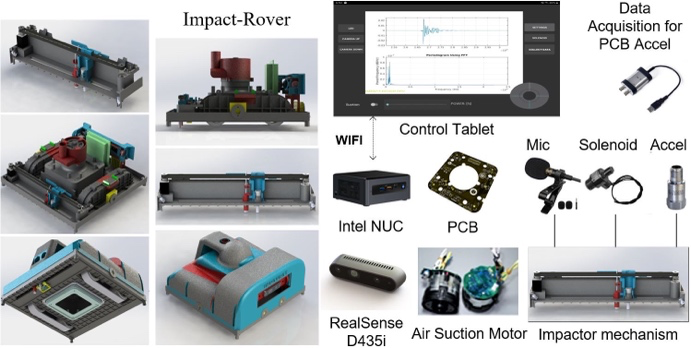
Impact-sounding (IS) and impact-echo (IE) are well-developed non-destructive evaluation (NDE) methods that are widely used for inspections of concrete structures to ensure the safety and sustainability. However, it is a tedious work to collect IS and IE data along grid lines covering a large target area for characterization of subsurface defects. On the other hand, data processing is very complicated that requires domain experts to interpret the results. To address the above problems, we present a novel robotic inspection system named as Impact-Rover to automate the data collection process and introduce data analytics software to visualize the inspection result allowing regular non-professional people to understand. The system consists of three modules: 1) a robotic platform with vertical mobility to collect IS and IE data in hard-to-reach locations, 2) vision-based positioning module that fuses the RGB-D camera, IMU and wheel encoder to estimate the 6-DOF pose of the robot, 3) a data analytics software module for processing the IS data to generate defect maps. The Impact-Rover hosts both IE and IS devices on a sliding mechanism and can perform move-stop-sample operations to collect multiple IS and IE data at adjustable spacing. The robot takes samples much faster than the manual data collection method because it automatically takes the multiple measurements along a straight line and records the locations. This paper focuses on reporting experimental results on IS. We calculate features and use unsupervised learning methods for analyzing the data. By combining the pose generated by our vision-based localization module and the position of the head of the sliding mechanism we can generate maps of possible defects. The results on concrete slabs demonstrate that our impact-sounding system can effectively reveal shallow defects.
翻译:影响测距(IS)和影响测距(IE)是完善的非破坏性评估方法,广泛用于检查具体结构,以确保安全和可持续性;然而,按照网格线收集IS和IE数据是一项乏味的工作,涉及一个大的目标区域,对地表下缺陷进行定性。另一方面,数据处理非常复杂,需要域专家解释结果。为了解决上述问题,我们推出了一个名为“影响测距”的新型机器人检查系统,将数据收集进程自动化,并引入数据分析软件,以便对检查结果进行可视化,使非专业人员能够有效地理解安全性和可持续性;然而,该系统包括三个模块:(1) 一个垂直移动的机器人平台,在难以到达的地点收集IS和IE数据;(2) 基于视觉的定位模块,将RGB-D相机、IMU和轮式编码连接起来,以估计机器人的6-DOF结构;(3) 一个用于处理IS数据的基于数据的数据解析软件模块,以生成缺陷地图。 影响测距将IE和IS的多轨道测距(IE)的图像定位定位定位定位,在运行过程中将运行多路路路路段的服务器,在移动的服务器上进行数据分析,因为我们的数据收集系统可以进行快速数据采集系统可以进行。