
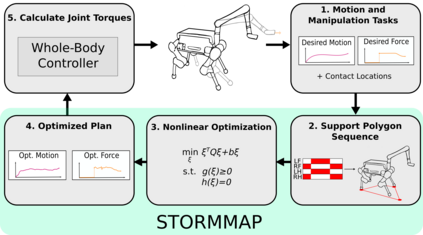
Manipulators can be added to legged robots, allowing them to interact with and change their environment. Legged mobile manipulation planners must consider how contact forces generated by these manipulators affect the system. Current planning strategies either treat these forces as immutable during planning or are unable to optimize over these contact forces while operating in real-time. This paper presents the Stability and Task Oriented Receding-Horizon Motion and Manipulation Autonomous Planner (STORMMAP) that is able to generate continuous plans for the robot's motion and manipulation force trajectories that ensure dynamic feasibility and stability of the platform, and incentivizes accomplishing manipulation and motion tasks specified by a user. STORMMAP uses a nonlinear optimization problem to compute these plans and is able to run in real-time by assuming contact locations are given a-priori, either by a user or an external algorithm. A variety of simulated experiments on a quadruped with a manipulator mounted to its torso demonstrate the versatility of STORMMAP. In contrast to existing state of the art methods, the approach described in this paper generates continuous plans in under ten milliseconds, an order of magnitude faster than previous strategies.
翻译:拖动器可以添加到拖动机器人中, 允许他们与环境互动并改变环境。 拖动式移动操纵规划者必须考虑如何让这些操纵器产生的接触力量对系统产生影响。 目前的规划战略要么将这些力量视为规划期间无法移动的, 要么在实时操作时无法优化这些接触力量。 本文展示了稳定与任务( TormMMAP ) 和任务( TORMMAP ), 它能够产生机器人运动和操纵的连续计划, 确保平台的动态可行性和稳定性, 并激励完成用户指定的操作和动作任务。 STORMMAP 使用非线性优化问题来计算这些计划, 并且能够实时运行, 假设接触地点, 由用户或外部算法给它一个首选。 一系列模拟实验, 在一个四曲折的机械操纵器安装到其躯体上, 展示了 STORMMAP 的多功能性。 与当前状态相比, STORMMAP 相比, 快速的方法比以往十大的顺序产生连续计划 。

相关内容

Source: Apple - iOS 8


