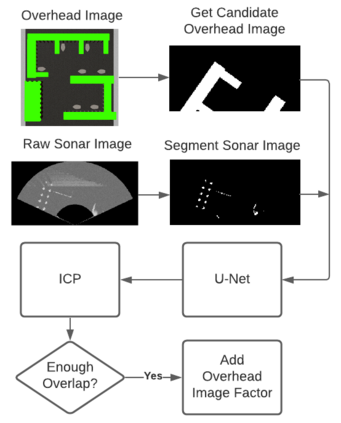
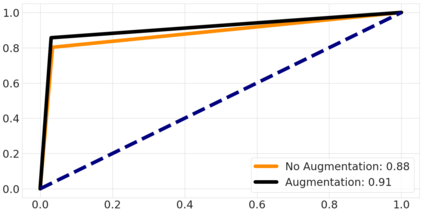
Simultaneous localization and mapping (SLAM) is a critical capability for any autonomous underwater vehicle (AUV). However, robust, accurate state estimation is still a work in progress when using low-cost sensors. We propose enhancing a typical low-cost sensor package using widely available and often free prior information; overhead imagery. Given an AUV's sonar image and a partially overlapping, globally-referenced overhead image, we propose using a convolutional neural network (CNN) to generate a synthetic overhead image predicting the above-surface appearance of the sonar image contents. We then use this synthetic overhead image to register our observations to the provided global overhead image. Once registered, the transformation is introduced as a factor into a pose SLAM factor graph. We use a state-of-the-art simulation environment to perform validation over a series of benchmark trajectories and quantitatively show the improved accuracy of robot state estimation using the proposed approach. We also show qualitative outcomes from a real AUV field deployment. Video attachment: https://youtu.be/_uWljtp58ks
翻译:同步本地化和绘图(SLAM)是任何自主水下飞行器(AUV)的关键能力。然而,在使用低成本传感器时,稳健、准确的状态估计仍然是一项正在开展的工作。我们提议使用广泛和通常免费的先前信息,即高空图像,加强典型的低成本传感器包件。鉴于AUV的声纳图像以及部分重叠的、全球参照的高空图像,我们提议使用一个革命性神经网络(CNN)来生成一个合成的间接图像,预测声纳图像内容的表面表面外观。我们随后使用这一合成间接图像将我们的观测结果登记到所提供的全球高空图像中。我们一旦注册,这种转换就被引入成一个要素,成为SLAM要素图。我们使用一个最先进的模拟环境,对一系列基准轨迹进行验证,并用拟议方法量化地显示机器人状态估计的准确性提高。我们还展示了真实的AV实地部署的质量结果。视频附文: https://yotu.be/uWljtp58ks。