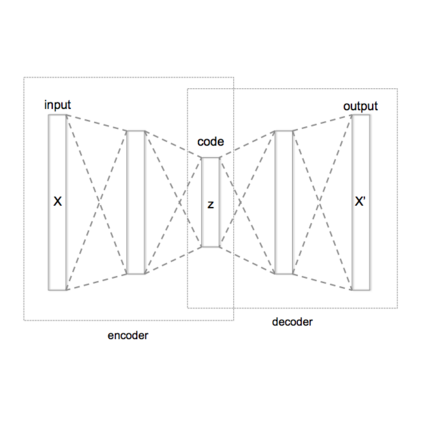
The booming of electric vehicles demands efficient battery disassembly for recycling to be environment-friendly. Currently, battery disassembly is still primarily done by humans, probably assisted by robots, due to the unstructured environment and high uncertainties. It is highly desirable to design autonomous solutions to improve work efficiency and lower human risks in high voltage and toxic environments. This paper proposes a novel neurosymbolic method, which augments the traditional Variational Autoencoder (VAE) model to learn symbolic operators based on raw sensory inputs and their relationships. The symbolic operators include a probabilistic state symbol grounding model and a state transition matrix for predicting states after each execution to enable autonomous task and motion planning. At last, the method's feasibility is verified through test results.
翻译:电动车辆的蓬勃发展要求高效的电池拆卸,以便进行再循环,这是环保的。目前,电池拆卸仍主要由人类进行,可能由机器人协助,因为环境不结构,而且不确定性很大。非常可取的是设计自主解决方案,以提高高电压和有毒环境中的工作效率和降低人类风险。本文提出了一种新的神经同步方法,该方法将增强传统的多动自动编码模型(VAE)模式,以学习基于原始感官投入及其关系的象征性操作者。象征性操作者包括一个概率性的国家符号基建模型,以及一个在每次执行后预测状态的州过渡矩阵,以便能够进行自主的任务和运动规划。最终,该方法的可行性通过测试结果得到验证。