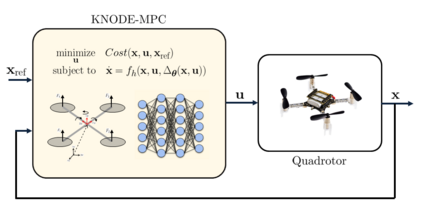
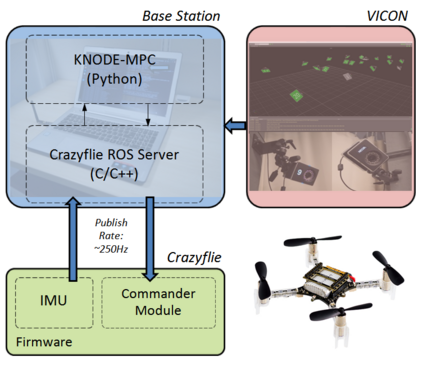
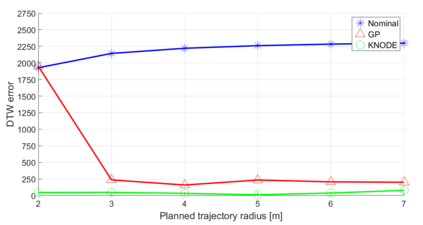
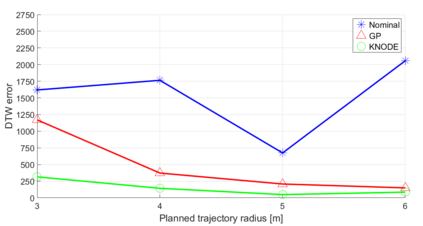
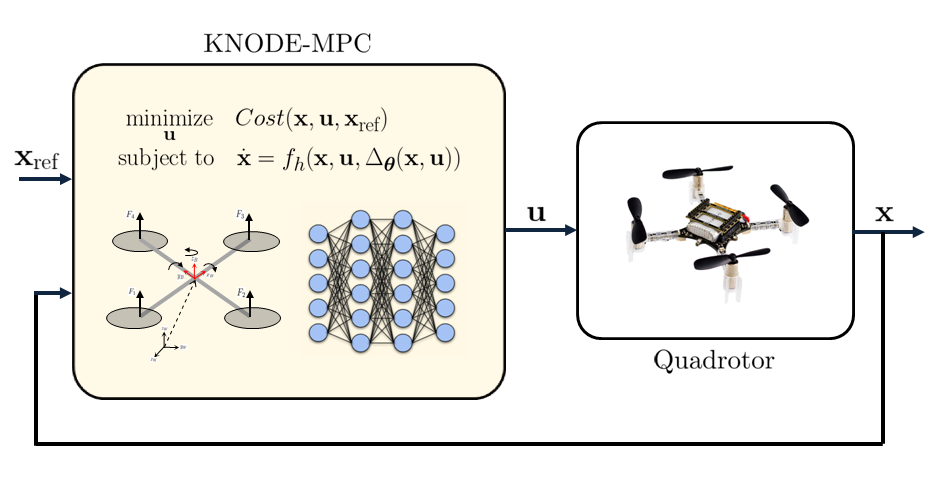
In this work, we consider the problem of deriving and incorporating accurate dynamic models for model predictive control (MPC) with an application to quadrotor control. MPC relies on precise dynamic models to achieve the desired closed-loop performance. However, the presence of uncertainties in complex systems and the environments they operate in poses a challenge in obtaining sufficiently accurate representations of the system dynamics. In this work, we make use of a deep learning tool, knowledge-based neural ordinary differential equations (KNODE), to augment a model obtained from first principles. The resulting hybrid model encompasses both a nominal first-principle model and a neural network learnt from simulated or real-world experimental data. Using a quadrotor, we benchmark our hybrid model against a state-of-the-art Gaussian Process (GP) model and show that the hybrid model provides more accurate predictions of the quadrotor dynamics and is able to generalize beyond the training data. To improve closed-loop performance, the hybrid model is integrated into a novel MPC framework, known as KNODE-MPC. Results show that the integrated framework achieves 73% improvement in simulations and more than 14% in physical experiments, in terms of trajectory tracking performance.
翻译:在这项工作中,我们考虑了模型预测控制(MPC)的精确动态模型(MPC)的衍生和整合问题,该模型应用于对二次曲线控制。MPC依靠精确的动态模型来实现理想的闭环性能。然而,复杂的系统及其运行环境存在不确定性,对系统动态得到足够准确的描述构成挑战。在这项工作中,我们利用一个深层次的学习工具,即基于知识的神经普通神经差异方程式(KNODE),以扩大从最初原则中获得的模型。由此产生的混合模型既包括一个名义的一原则模型,也包括从模拟或现实世界实验数据中学习的神经网络。我们利用一个二次模型,将我们的混合模型与最先进的高斯进程(GP)模型作为基准,并表明混合模型提供了对二次模型动态的更准确的预测,并且能够超越培训数据的范围。为了改进闭环性性能,混合模型被纳入一个新型的MPC框架,称为KNODE-MPC。结果显示,综合框架在模拟和14个以上的物理实验中实现了73%的运行轨迹。