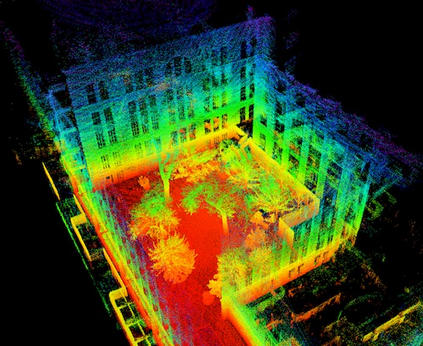
As a crucial infrastructure of intelligent mobile robots, LiDAR-Inertial odometry (LIO) provides the basic capability of state estimation by tracking LiDAR scans. The high-accuracy tracking generally involves the kNN search, which is used with minimizing the point-to-plane distance. The cost for this, however, is maintaining a large local map and performing kNN plane fit for each point. In this work, we reduce both time and space complexity of LIO by saving these unnecessary costs. Technically, we design a plane pre-fitting (PPF) pipeline to track the basic skeleton of the 3D scene. In PPF, planes are not fitted individually for each scan, let alone for each point, but are updated incrementally as the scene 'flows'. Unlike kNN, the PPF is more robust to noisy and non-strict planes with our iterative Principal Component Analyse (iPCA) refinement. Moreover, a simple yet effective sandwich layer is introduced to eliminate false point-to-plane matches. Our method was extensively tested on a total number of 22 sequences across 5 open datasets, and evaluated in 3 existing state-of-the-art LIO systems. By contrast, LIO-PPF can consume only 36% of the original local map size to achieve up to 4x faster residual computing and 1.92x overall FPS, while maintaining the same level of accuracy. We fully open source our implementation at https://github.com/xingyuuchen/LIO-PPF.
翻译:暂无翻译