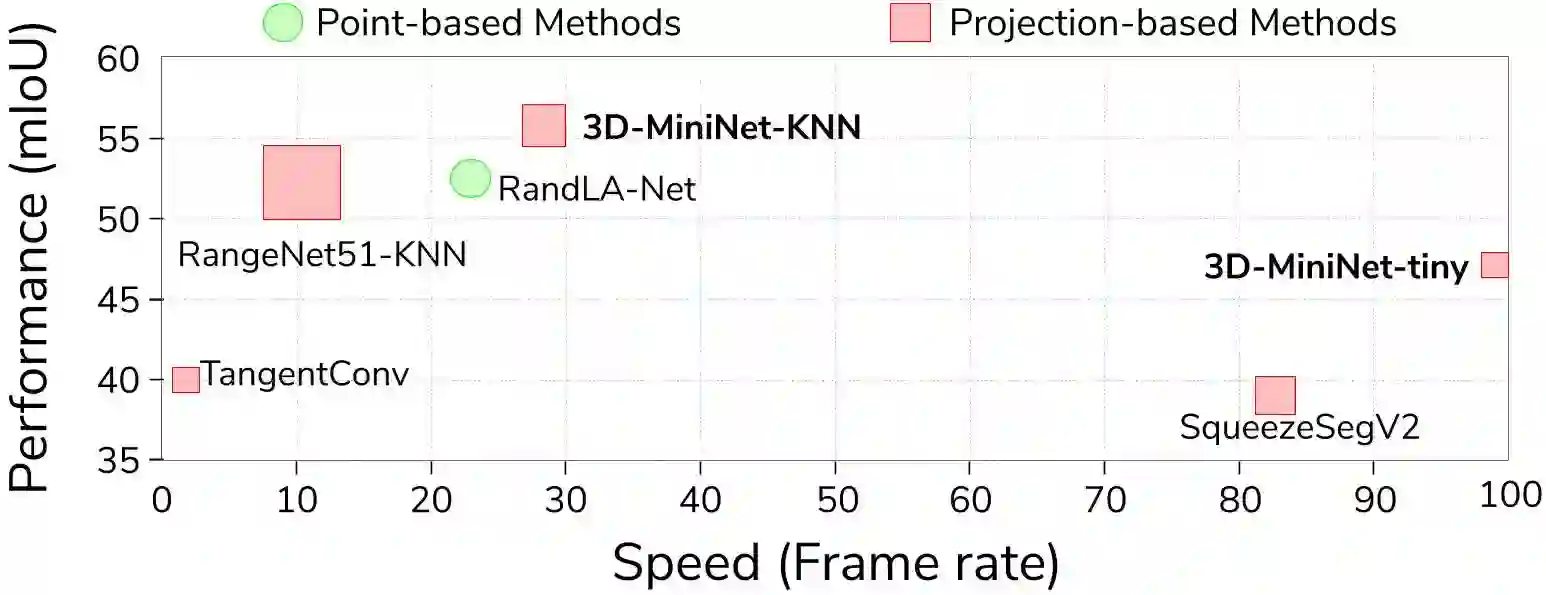
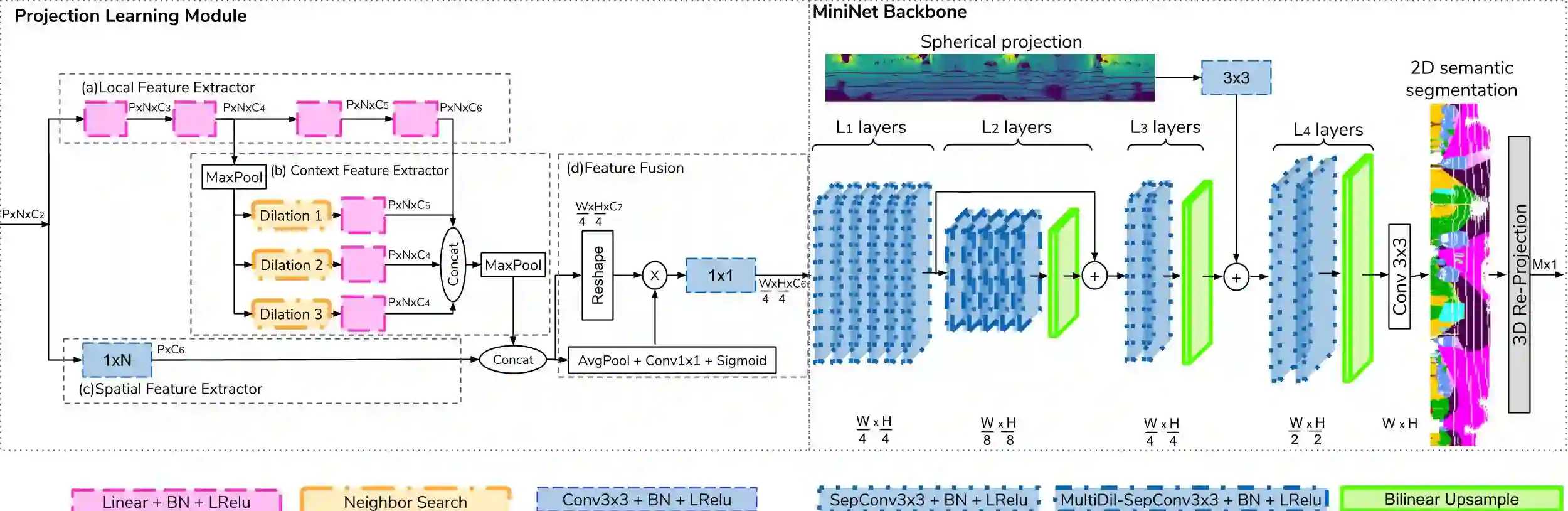
LIDAR semantic segmentation, which assigns a semantic label to each 3D point measured by the LIDAR, is becoming an essential task for many robotic applications such as autonomous driving. Fast and efficient semantic segmentation methods are needed to match the strong computational and temporal restrictions of many of these real-world applications. This work presents 3D-MiniNet, a novel approach for LIDAR semantic segmentation that combines 3D and 2D learning layers. It first learns a 2D representation from the raw points through a novel projection which extracts local and global information from the 3D data. This representation is fed to an efficient 2D Fully Convolutional Neural Network (FCNN) that produces a 2D semantic segmentation. These 2D semantic labels are re-projected back to the 3D space and enhanced through a post-processing module. The main novelty in our strategy relies on the projection learning module. Our detailed ablation study shows how each component contributes to the final performance of 3D-MiniNet. We validate our approach on well known public benchmarks (SemanticKITTI and KITTI), where 3D-MiniNet gets state-of-the-art results while being faster and more parameter-efficient than previous methods.
翻译:LIDAR 语义分解为3D 和 2D 学习分解提供了一种新颖的方法。 它首先通过从3D 数据中提取本地和全球信息的新投影从原始点中学习了 2D 的表示方式。 这个表示方式被反馈到一个高效的 2D 完全进化神经网络(FCNN), 产生2D 语义分解。 这些2D 语义标签被重新投射回3D 空间并通过后处理模块得到加强。 我们战略中的主要新颖之处依赖于投影学习模块。 我们的详细分析显示每个组成部分如何为 3D- MiniNet 的最后性能做出贡献。 我们验证了我们关于已知的公共基准(SemanIT 和 KTI ) 的方法(Sematrial 3- directive) 和 KNetTI 方法比以往更快。