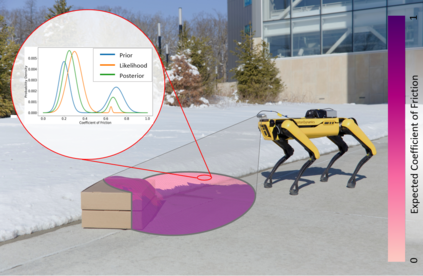
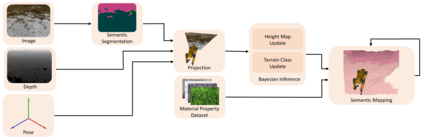
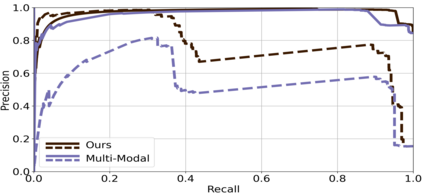
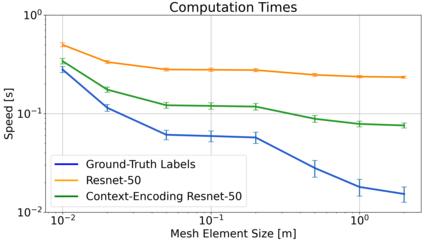
The equations of motion governing mobile robots are dependent on terrain properties such as the coefficient of friction, and contact model parameters. Estimating these properties is thus essential for robotic navigation. Ideally any map estimating terrain properties should run in real time, mitigate sensor noise, and provide probability distributions of the aforementioned properties, thus enabling risk-mitigating navigation and planning. This paper addresses these needs and proposes a Bayesian inference framework for semantic mapping which recursively estimates both the terrain surface profile and a probability distribution for terrain properties using data from a single RGB-D camera. The proposed framework is evaluated in simulation against other semantic mapping methods and is shown to outperform these state-of-the-art methods in terms of correctly estimating simulated ground-truth terrain properties when evaluated using a precision-recall curve and the Kullback-Leibler divergence test. Additionally, the proposed method is deployed on a physical legged robotic platform in both indoor and outdoor environments, and we show our method correctly predicts terrain properties in both cases. The proposed framework runs in real-time and includes a ROS interface for easy integration.
翻译:移动机器人运动的方程式取决于地形特性,如摩擦系数和接触模型参数。因此,估算这些特性对于机器人导航至关重要。理想的情况是,任何估算地形特性的地图都应实时运行,减少传感器噪音,并提供上述特性的概率分布,从而有利于减轻风险的导航和规划。本文件讨论了这些需要,并提出了用于语义绘图的巴耶斯推理框架,该框架通过使用一个单一 RGB-D 相机的数据对地形地貌剖面图和地形特性的概率分布进行回溯性估计。拟议框架在模拟其他语义绘图方法时进行评估,并显示在使用精确-回调曲线和 Kullback-Leper 差异测试进行评估时,在正确估计模拟地面图貌特性方面优于这些最先进的方法。此外,拟议方法在室内和室外环境中都安装在一个有形的脚架机器人平台上,同时显示我们的方法正确预测了两种情况中的地形特性。拟议框架将实时运行,并包括用于容易整合的ROS界面。