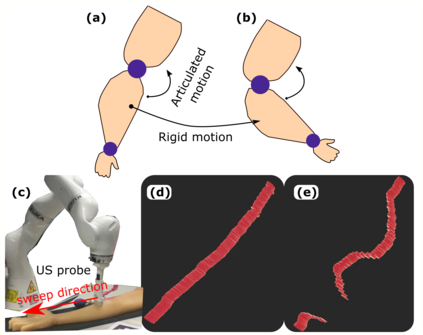
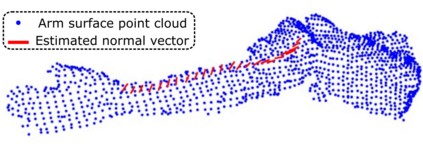
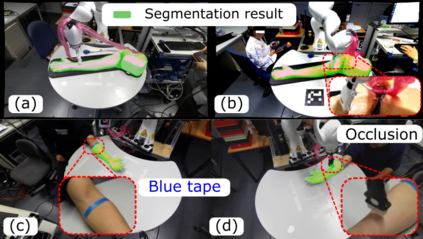
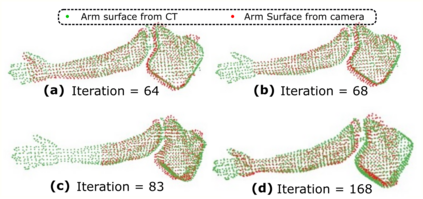
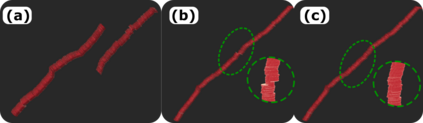
Robotic ultrasound (US) imaging has been seen as a promising solution to overcome the limitations of free-hand US examinations, i.e., inter-operator variability. \revision{However, the fact that robotic US systems cannot react to subject movements during scans limits their clinical acceptance.} Regarding human sonographers, they often react to patient movements by repositioning the probe or even restarting the acquisition, in particular for the scans of anatomies with long structures like limb arteries. To realize this characteristic, we proposed a vision-based system to monitor the subject's movement and automatically update the scan trajectory thus seamlessly obtaining a complete 3D image of the target anatomy. The motion monitoring module is developed using the segmented object masks from RGB images. Once the subject is moved, the robot will stop and recompute a suitable trajectory by registering the surface point clouds of the object obtained before and after the movement using the iterative closest point algorithm. Afterward, to ensure optimal contact conditions after repositioning US probe, a confidence-based fine-tuning process is used to avoid potential gaps between the probe and contact surface. Finally, the whole system is validated on a human-like arm phantom with an uneven surface, while the object segmentation network is also validated on volunteers. The results demonstrate that the presented system can react to object movements and reliably provide accurate 3D images.
翻译:机器人超声波(US)成像被视作是克服美国自由手表检查限制的一个有希望的解决方案,即操作者之间的变异性。\ revision{然而,机器人的美国系统无法在扫描过程中对物体运动作出反应这一事实限制了临床的接受度。}关于人类声学学家,它们往往会通过重新定位探测器来对病人运动作出反应,甚至重新开始获取,特别是对于具有像肢体动脉这样的长结构的解剖扫描。为了实现这一特征,我们提议了一个基于视觉的系统来监测对象的移动并自动更新扫描轨迹,从而无缝地取得目标解剖完整的3D图像。运动监测模块是利用来自RGB图像的分解对象面具开发的。一旦移动对象,机器人将停止并重新构造适当的轨迹,通过使用迭接最接近点的算法来记录在运动之前和之后获得的物体的表面云层。之后,为了确保最佳的接触条件,我们建议采用基于信任的微调过程来避免探测器和接触地面的物体之间的潜在差距。最后,运动模块将显示整个系统向地面的稳定性反应。