
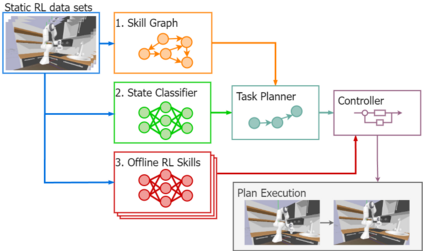
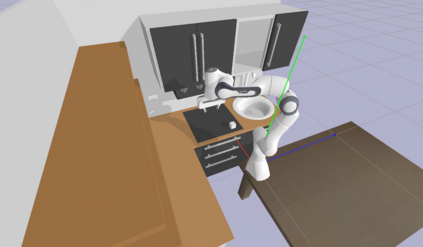
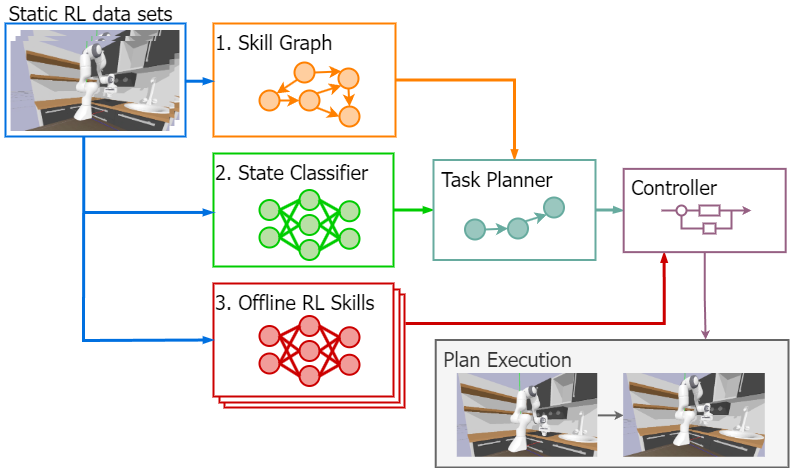
Reinforcement Learning has received wide interest due to its success in competitive games. Yet, its adoption in everyday applications is limited (e.g. industrial, home, healthcare, etc.). In this paper, we address this limitation by presenting a framework for planning over offline skills and solving complex tasks in real-world environments. Our framework is comprised of three modules that together enable the agent to learn from previously collected data and generalize over it to solve long-horizon tasks. We demonstrate our approach by testing it on a robotic arm that is required to solve complex tasks.
翻译:暂无翻译
相关内容
专知会员服务
54+阅读 · 2020年1月30日
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
Arxiv
0+阅读 · 2023年8月14日
Arxiv
15+阅读 · 2022年1月5日
Arxiv
10+阅读 · 2021年12月14日
Arxiv
14+阅读 · 2019年1月17日



相关VIP内容
专知会员服务
54+阅读 · 2020年1月30日
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
相关资讯
相关论文
Arxiv
0+阅读 · 2023年8月14日
Arxiv
15+阅读 · 2022年1月5日
Arxiv
10+阅读 · 2021年12月14日
Arxiv
14+阅读 · 2019年1月17日