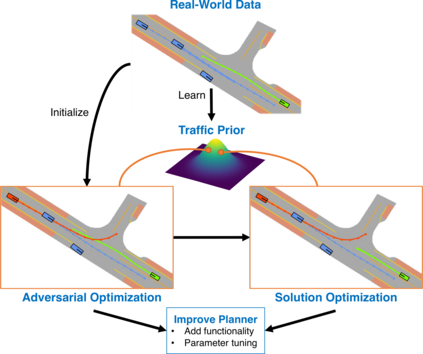
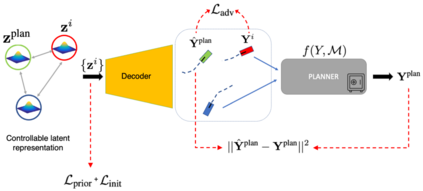
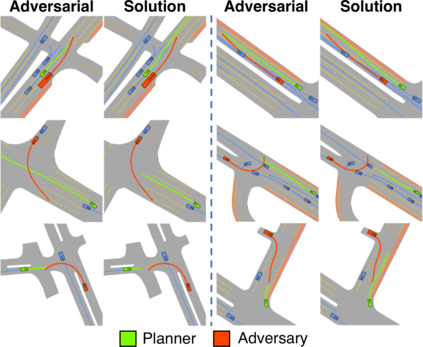
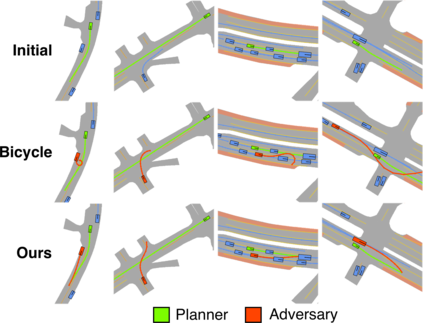
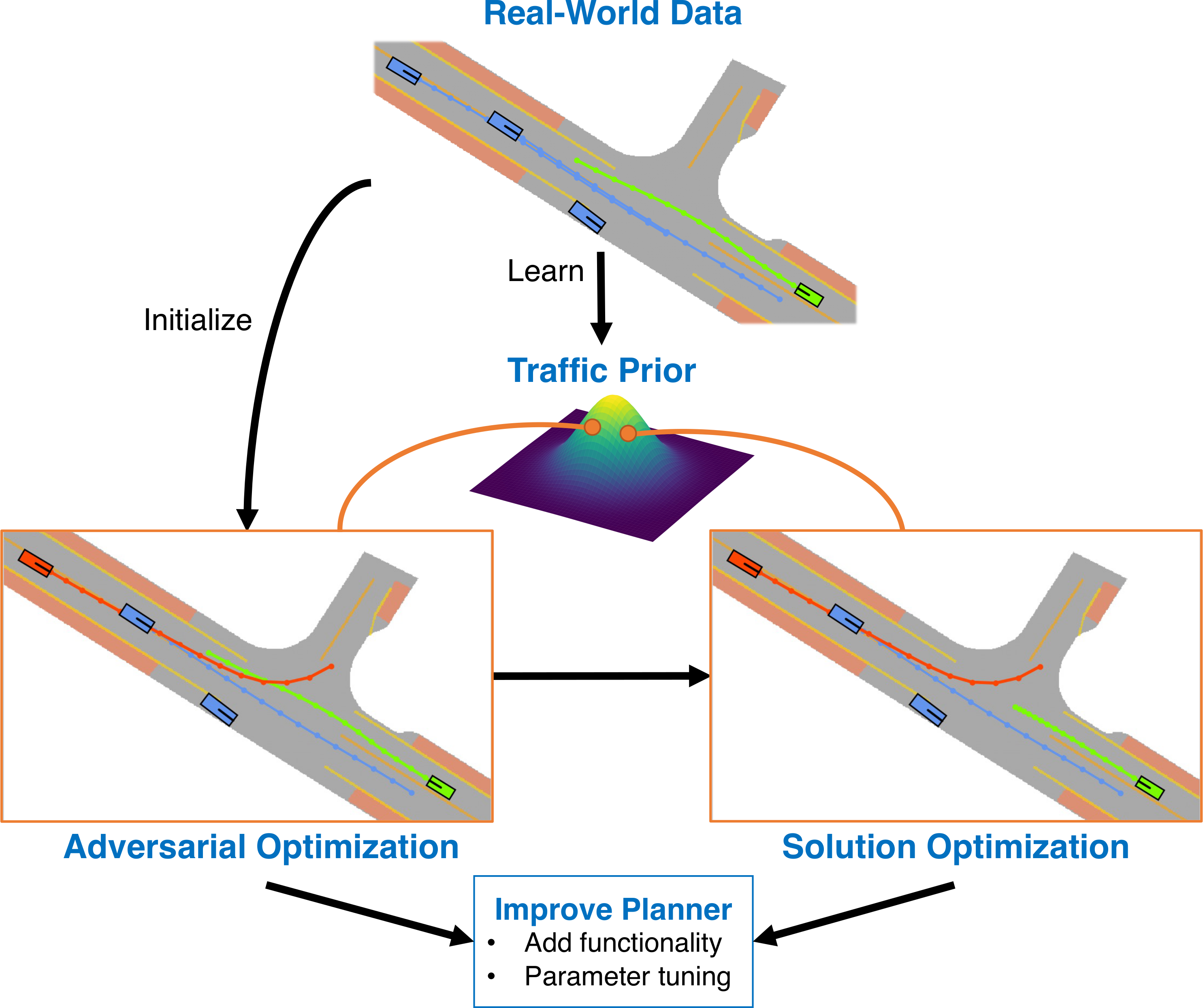
Evaluating and improving planning for autonomous vehicles requires scalable generation of long-tail traffic scenarios. To be useful, these scenarios must be realistic and challenging, but not impossible to drive through safely. In this work, we introduce STRIVE, a method to automatically generate challenging scenarios that cause a given planner to produce undesirable behavior, like collisions. To maintain scenario plausibility, the key idea is to leverage a learned model of traffic motion in the form of a graph-based conditional VAE. Scenario generation is formulated as an optimization in the latent space of this traffic model, effected by perturbing an initial real-world scene to produce trajectories that collide with a given planner. A subsequent optimization is used to find a "solution" to the scenario, ensuring it is useful to improve the given planner. Further analysis clusters generated scenarios based on collision type. We attack two planners and show that STRIVE successfully generates realistic, challenging scenarios in both cases. We additionally "close the loop" and use these scenarios to optimize hyperparameters of a rule-based planner.
翻译:为了有用,这些情景必须是现实的,具有挑战性,但并非不可能安全地通过。在这项工作中,我们引入了一种自动产生具有挑战性的情景的方法,使某个规划者产生不可取的行为,如碰撞。为了保持情景的可信度,关键的想法是以图表为基础的条件VAE的形式利用交通运动的学习模型。情景生成是作为这一交通模式潜在空间的一种优化,通过对初始真实世界场景进行渗透,产生与某个规划者相撞的轨迹。随后的优化用于寻找“解决方案”来改进特定的规划者。进一步分析基于碰撞类型产生的情景。我们攻击两个规划者,并表明STIVE成功地在两种情况下都产生了现实的、具有挑战性的情景。我们进一步“关闭循环”并使用这些情景来优化一个基于规则的规划者的超参数。