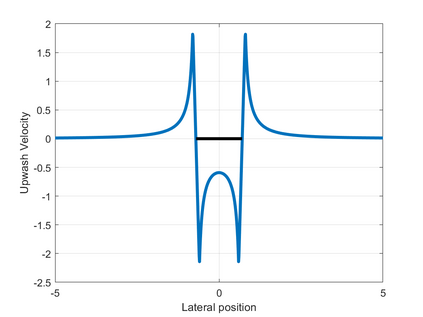
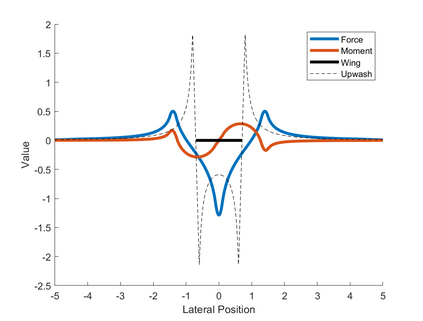
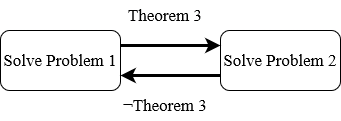
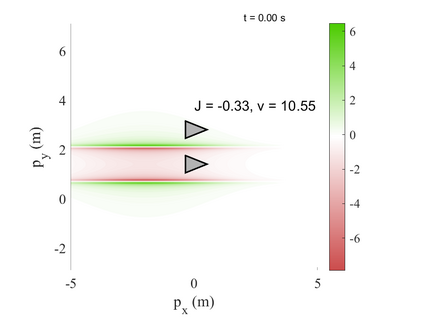
The study of robotic flocking has received significant attention in the past twenty years. In this article, we present a constraint-driven control algorithm that minimizes the energy consumption of individual agents and yields an emergent V formation. As the formation emerges from the decentralized interaction between agents, our approach is robust to the spontaneous addition or removal of agents to the system. First, we present an analytical model for the trailing upwash behind a fixed-wing UAV, and we derive the optimal air speed for trailing UAVs to maximize their travel endurance. Next, we prove that simply flying at the optimal airspeed will never lead to emergent flocking behavior, and we propose a new decentralized "anseroid" behavior that yields emergent V formations. We encode these behaviors in a constraint-driven control algorithm that minimizes the locomotive power of each UAV. Finally, we prove that UAVs initialized in an approximate V or echelon formation will converge under our proposed control law, and we demonstrate this emergence occurs in real-time in simulation and in physical experiments with a fleet of Crazyflie quadrotors.
翻译:在过去二十年中,对机器人羊群的研究受到极大关注。 在过去的二十年里,我们提出了限制驱动控制算法,最大限度地减少个别物剂的能量消耗,并产生一种突发V型形成。随着代理人之间分散互动的形成,我们的方法对自动增加或清除系统中的物剂具有很强的作用。首先,我们提出了一个在固定翼无人驾驶飞行器后面进行后继式灌注的分析模型,我们获得了跟踪无人驾驶飞行器的最佳空气速度,以最大限度地使其旅行耐力。其次,我们证明只要在最佳空气速度下飞行,就永远不会导致突发蜂群行为,我们提出一种新的分散式“机器人”行为,产生突发V型物层。我们将这些行为编码成一种限制驱动控制算法,最大限度地减少每个无人驾驶飞行器的动力。最后,我们证明在大约V型或梯层形成中的无人驾驶飞行器将在我们拟议的控制法下汇集在一起。我们证明这种出现是在实时的模拟和物理实验中出现,与一个疯狂夫利的夸德罗尔机群。