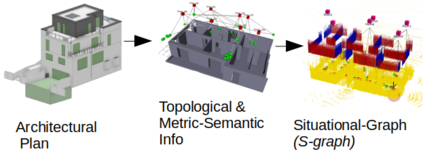
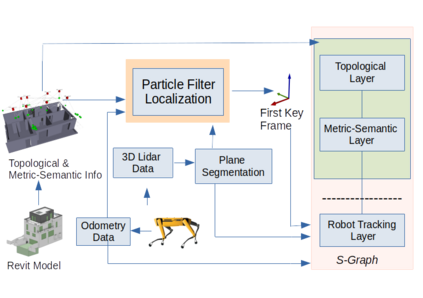
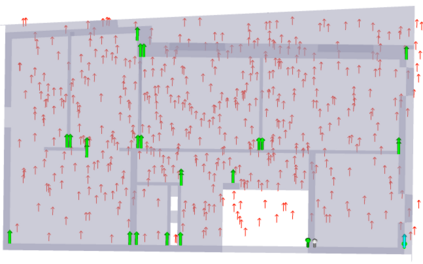
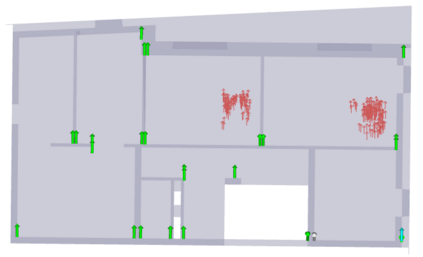
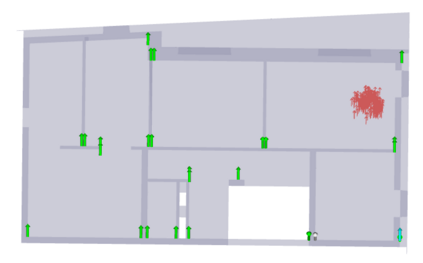
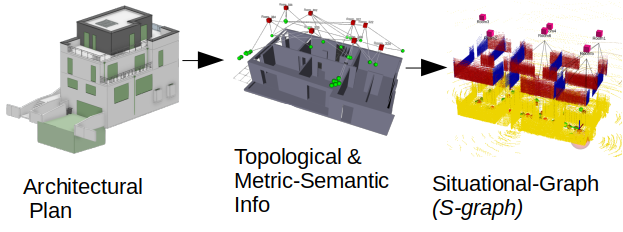
Robots in the construction industry can reduce costs through constant monitoring of the work progress, using high precision data capturing. Accurate data capturing requires precise localization of the mobile robot within the environment. In this paper we present our novel work on robot localization which extracts geometric, semantic as well as the topological information from the architectural plans in the form of walls and rooms, and creates the topological and metric-semantic layer of the Situational Graphs (S-Graphs) before navigating in the environment. When the robot navigates in the construction environment, it uses the robot odometry and the sensorial observations in the form of planar walls extracted from the 3D lidar measurements, to estimate its pose relying on a particle filter method, by exploiting the previously built situational graph and its available geometric, semantic and topological information. We validate our approach in both simulated and real datasets captured on actual on-going construction sites presenting state-of-the-art results when comparing it against traditional geometry based localization techniques.
翻译:建筑工业中的机器人可以通过不断监测工作进度来降低成本,使用高度精确的数据捕获。准确的数据采集要求精确地定位环境内的移动机器人。在本文中,我们介绍了我们关于机器人本地化的新颖工作,它以墙壁和房间的形式提取了几何、语义以及建筑图图中的地形学信息,并创造了环境导航前的地貌图(S-Graphs)的地形学和测量测量层层。当机器人在建筑环境中导航时,它使用机器人odophy 和从3D 里达尔测量中提取的平面壁的感官观测,通过利用先前建造的情况图及其现有的几何、语义学和地形学信息来估计其依赖粒子过滤法的形态。我们验证了我们在实际在现场采集的模拟和真实数据集中采用的方法,这些数据集显示了最新的结果,与传统的本地测量技术进行了比较。