
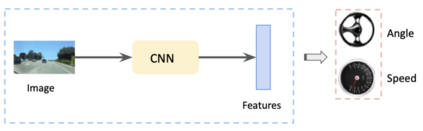
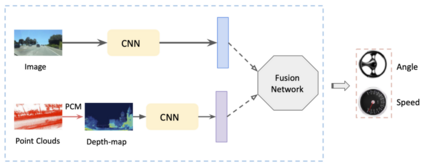
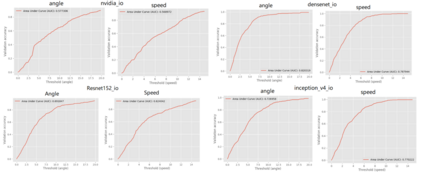
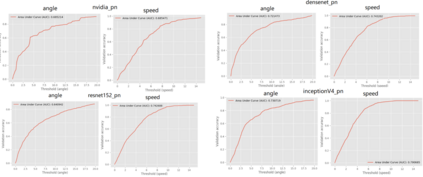
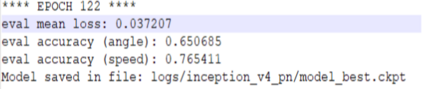
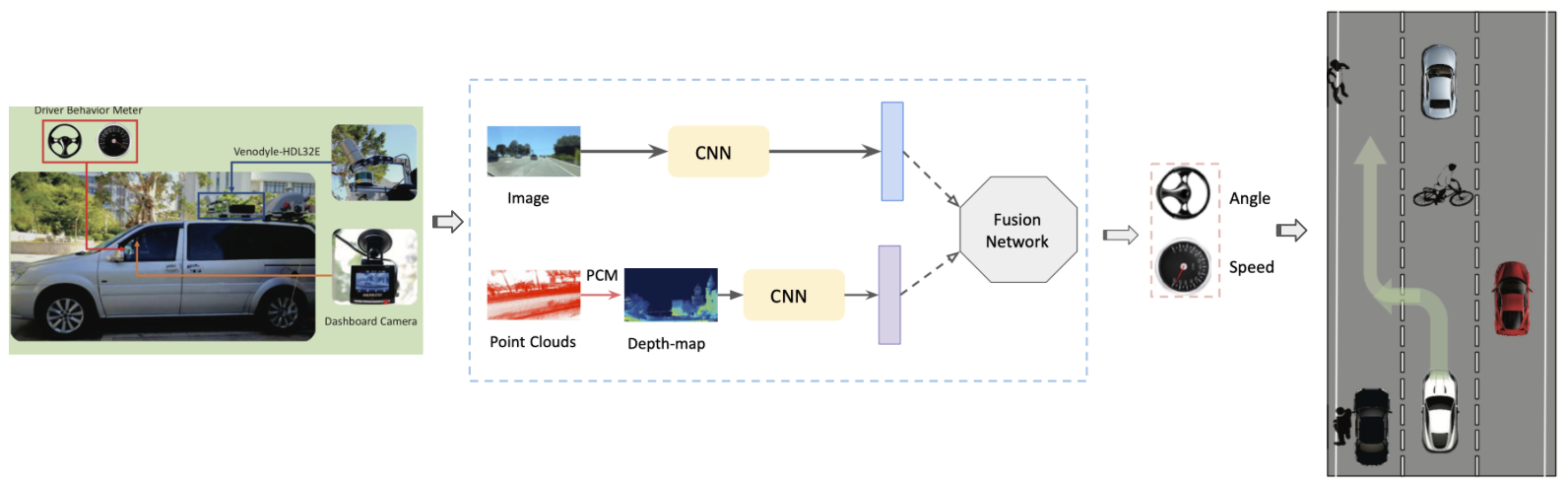
In this project, we implemented an end-to-end system that takes in combined visual features of video frames from a normal camera and depth information from a cloud points scanner, and predicts driving policies (vehicle speed and steering angle). We verified the safety of our system by comparing the predicted results with standard behaviors by real-world experienced drivers. Our test results show that the predictions can be considered as accurate in at lease half of the testing cases (50% 80%, depending on the model), and using combined features improved the performance in most cases than using video frames only.
翻译:暂无翻译




相关内容

CASES:International Conference on Compilers, Architectures, and Synthesis for Embedded Systems。
Explanation:嵌入式系统编译器、体系结构和综合国际会议。
Publisher:ACM。
SIT: http://dblp.uni-trier.de/db/conf/cases/index.html
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
Arxiv
0+阅读 · 2023年9月12日


相关VIP内容
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
相关资讯
相关论文
Arxiv
0+阅读 · 2023年9月12日