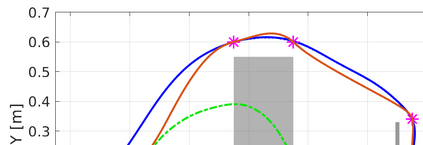
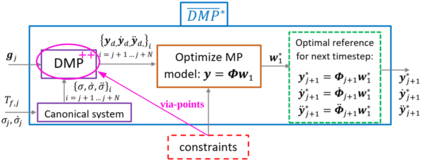
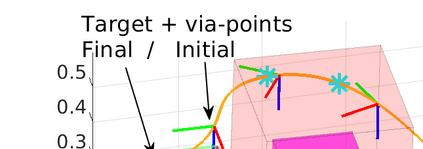
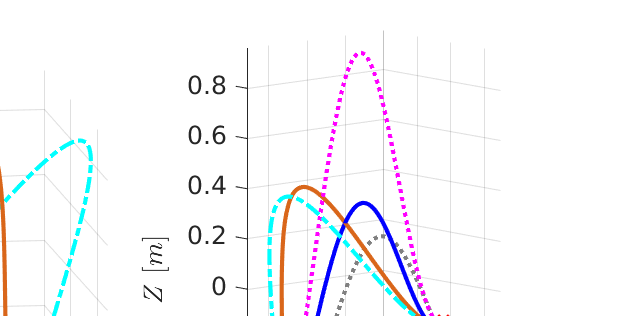
Dynamic Movement Primitives (DMP) have found remarkable applicability and success in various robotic tasks, which can be mainly attributed to their generalization, modulation and robustness properties. Nevertheless, the spatial generalization of DMP can be problematic in some cases, leading to excessive or unnatural spatial scaling. Moreover, incorporating intermediate points (via-points) to adjust the DMP trajectory, is not adequately addressed. In this work we propose an improved online spatial generalization, that remedies the shortcomings of the classical DMP generalization, and moreover allows the incorporation of dynamic via-points. This is achieved by designing an online adaptation scheme for the DMP weights which is proved to minimize the distance from the demonstrated acceleration profile to retain the shape of the demonstration, subject to dynamic via-point and initial/final state constraints. Extensive comparative simulations with the classical and other DMP variants are conducted, while experimental results validate the applicability and efficacy of the proposed method.
翻译:暂无翻译