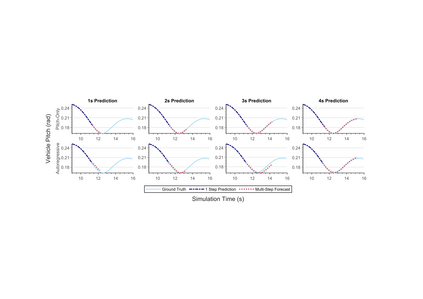
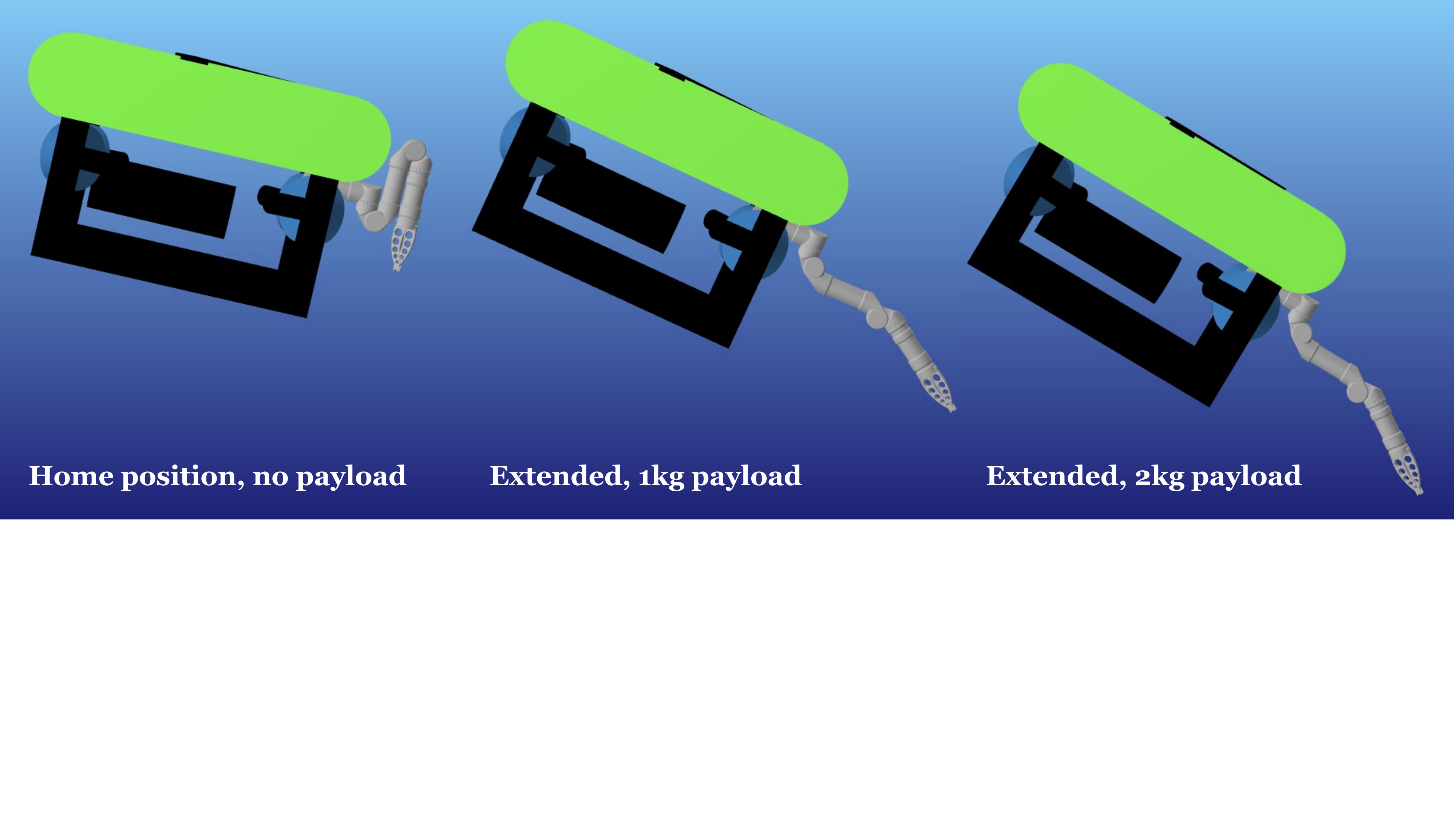
As Underwater Vehicle Manipulator Systems (UVMSs) have gotten smaller and lighter over the past years, it is becoming increasingly important to consider the coupling forces between the manipulator and the vehicle when planning and controlling the system. However, typical methods of handling these forces require an exact hydrodynamic model of the vehicle and access to low-level torque control on the manipulator, both of which are uncommon in the field. Therefore, many UVMS control methods are kinematics-based, which cannot inherently account for these effects. Our work bridges the gap between kinematic control and dynamics by training a recurrent neural network on simulated UVMS data to predict the pitch of the vehicle in the future based on the system's previous states. Kinematic planners and controllers can use this metric to incorporate dynamic knowledge without a computationally expensive model, improving their ability to perform underwater manipulation tasks.
翻译:过去几年来,水下车辆操纵系统(UVMS)越来越小,越来越轻,因此,在规划和控制系统时,考虑操纵者与车辆之间的混合力量变得越来越重要,然而,处理这些力量的典型方法要求车辆有一个精确的流体动力模型,并获得对操纵器的低水平电压控制,两者在外地都非常罕见。因此,许多UVMS控制方法都以运动学为基础,无法从根本上解释这些效应。我们的工作通过在模拟的UVMS数据上培训一个经常性神经网络,预测车辆今后在系统先前状态上的定位,从而弥合运动控制和动态之间的差距。 水下规划师和控制师可以使用这一模型,在不使用计算昂贵模型的情况下纳入动态知识,提高他们执行水下操纵任务的能力。