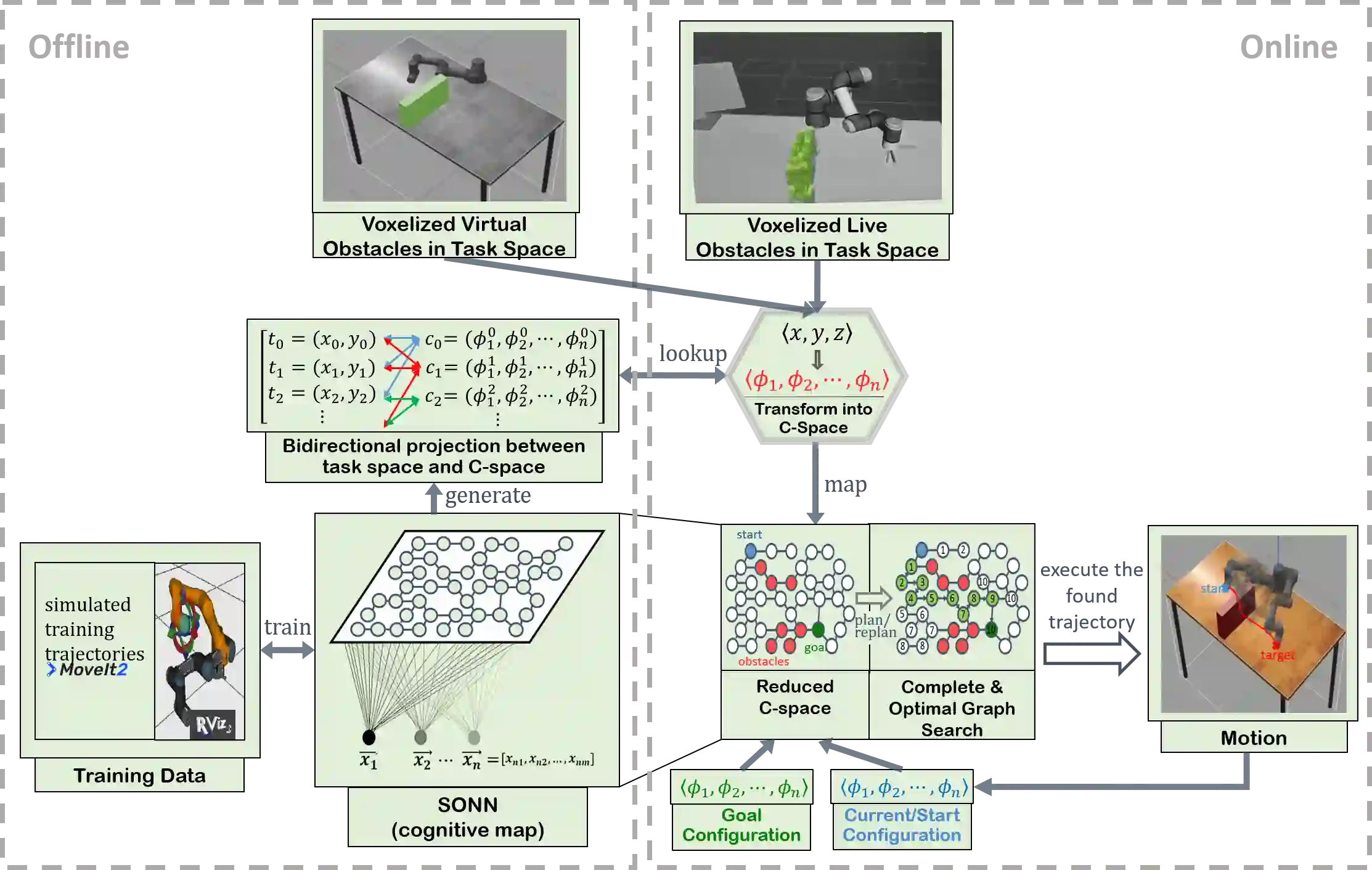
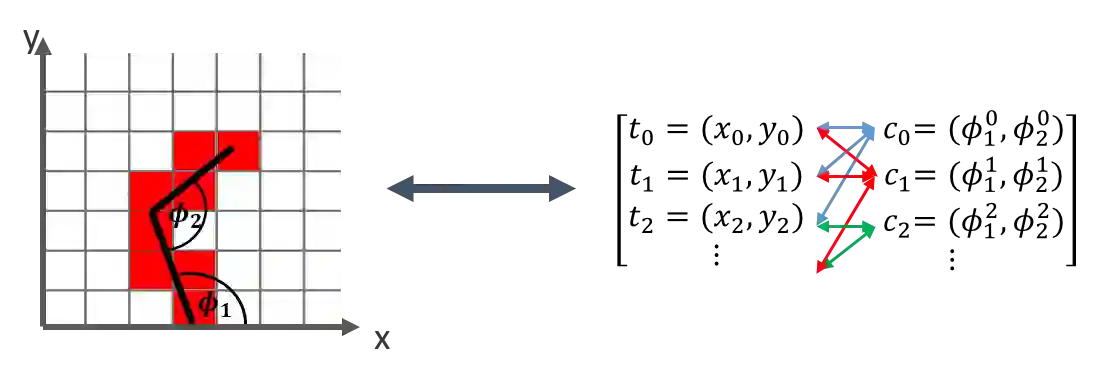
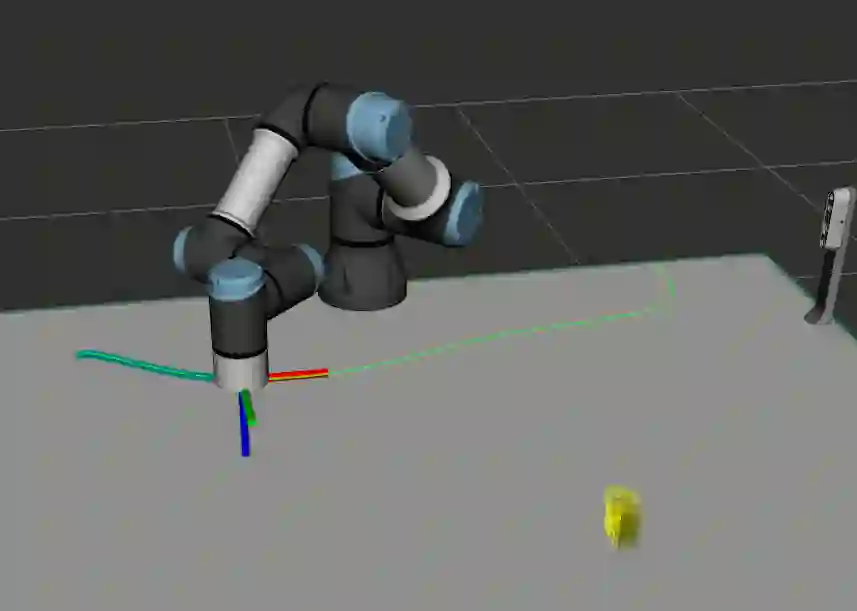
We present a biologically inspired approach for path planning with dynamic obstacle avoidance. Path planning is performed in a condensed configuration space of a robot generated by self-organizing neural networks (SONN). The robot itself and static as well as dynamic obstacles are mapped from the Cartesian task space into the configuration space by precomputed kinematics. The condensed space represents a cognitive map of the environment, which is inspired by place cells and the concept of cognitive maps in mammalian brains. The generation of training data as well as the evaluation were performed on a real industrial robot accompanied by simulations. To evaluate the reactive collision-free online planning within a changing environment, a demonstrator was realized. Then, a comparative study regarding sample-based planners was carried out. So we could show that the robot is able to operate in dynamically changing environments and re-plan its motion trajectories within impressing 0.02 seconds, which proofs the real-time capability of our concept.
翻译:路径规划是在由自我组织神经网络(SONN)生成的机器人的压缩配置空间中进行的。机器人本身和静态及动态障碍通过预先考虑的动力学从笛卡尔任务空间映射到配置空间。压缩空间代表了环境的认知图,由定位细胞和哺乳动物大脑认知图概念所启发。培训数据生成以及评估是在一个真正的工业机器人上进行的,同时进行模拟。为了在不断变化的环境中评价反应式的无碰撞在线规划,实现了演示器。随后,对基于样本的规划者进行了比较研究。因此我们可以表明,机器人能够在动态变化的环境中运作,并在0.02秒内重新规划其运动轨迹,这证明了我们概念的实时能力。