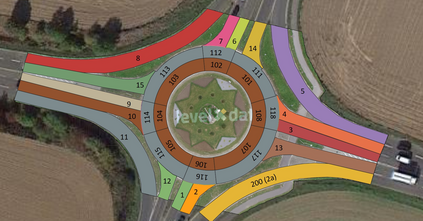
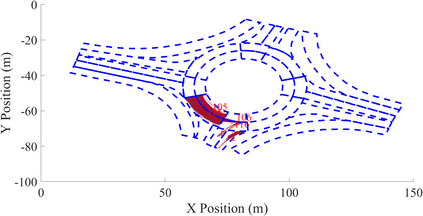
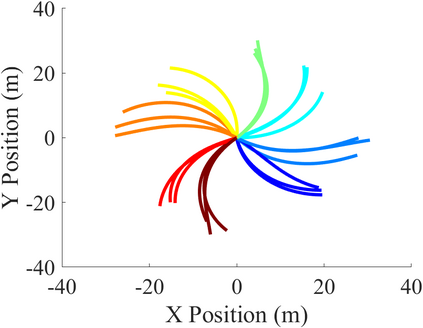
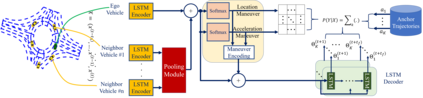
Predicting future behavior of the surrounding vehicles is crucial for self-driving platforms to safely navigate through other traffic. This is critical when making decisions like crossing an unsignalized intersection. We address the problem of vehicle motion prediction in a challenging roundabout environment by learning from human driver data. We extend existing recurrent encoder-decoder models to be advantageously combined with anchor trajectories to predict vehicle behaviors on a roundabout. Drivers' intentions are encoded by a set of maneuvers that correspond to semantic driving concepts. Accordingly, our model employs a set of maneuver-specific anchor trajectories that cover the space of possible outcomes at the roundabout. The proposed model can output a multi-modal distribution over the predicted future trajectories based on the maneuver-specific anchors. We evaluate our model using the public RounD dataset and the experiment results show the effectiveness of the proposed maneuver-based anchor regression in improving prediction accuracy, reducing the average RMSE to 28% less than the best baseline. Our code is available at https://github.com/m-hasan-n/roundabout.
翻译:预测周围车辆的未来行为对于自驾驶平台安全通过其他交通安全航行至关重要。 这在做出类似跨过未发信号的十字路口等决定时至关重要。 我们通过学习人类驱动数据来解决在充满挑战的环绕环境中的车辆运动预测问题。 我们扩展了现有的经常性编码器解码器模型,使之与锚轨轨迹有利地结合,以预测环绕车辆的行为。 驱动器的意图通过一系列与语义驾驶概念相对应的动作来编码。 因此,我们的模型使用一套特定操作的锚轨距,覆盖环绕中可能结果的空间。 拟议的模型可以输出基于特定操作锚的预测未来轨迹的多模式分布。 我们使用公共 RounD 数据集来评估我们的模型, 实验结果显示拟议操纵锚轨迹回归在提高预测准确性、将平均 RMSE 降低到比最佳基线低28 % 。 我们的代码可以在 https://github.com/m-hasan-n/courabour 上查到。