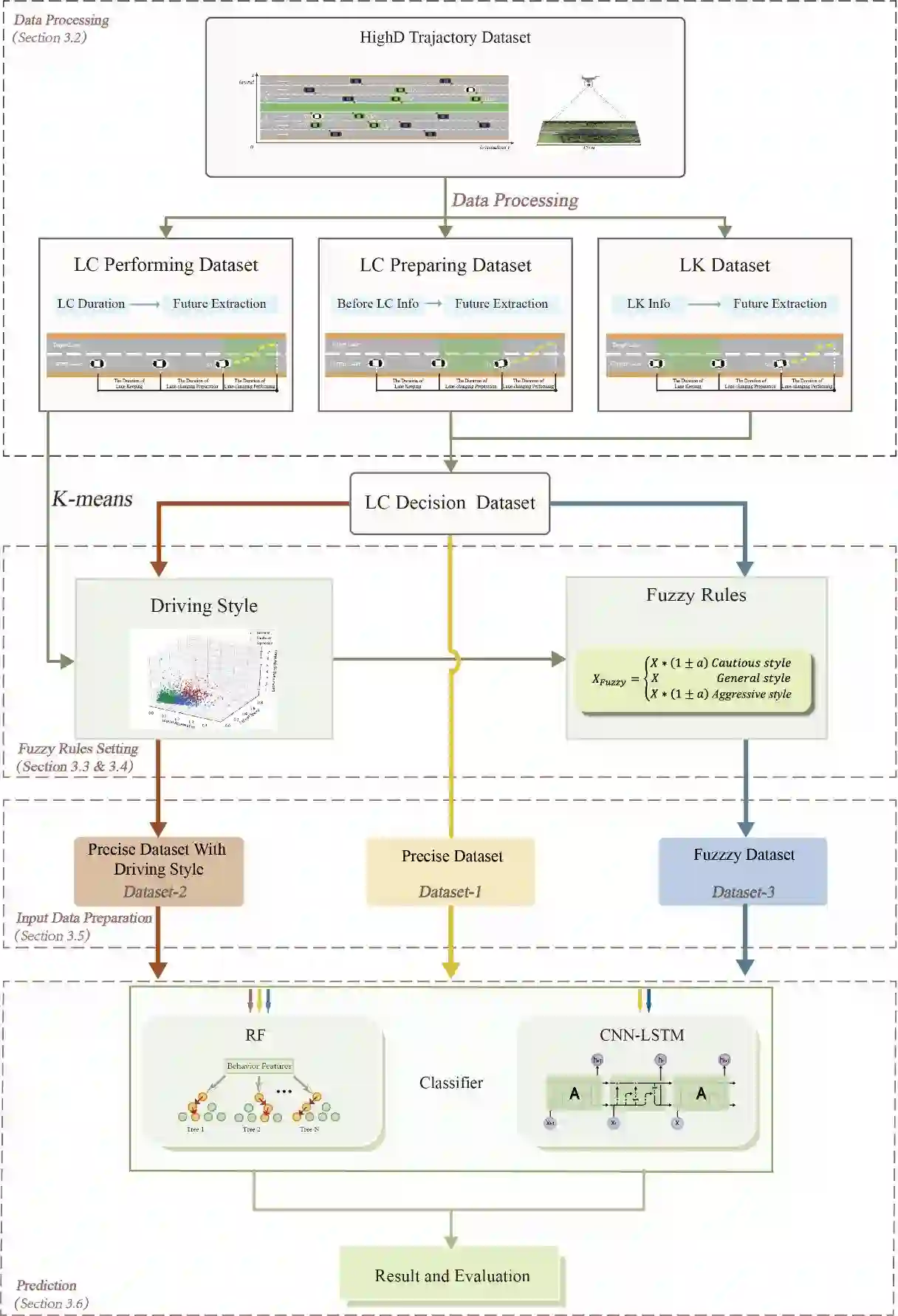
Artificial intelligence algorithms have been extensively applied in the field of intelligent transportation, especially for driving behavior analysis and prediction. This study proposes a novel framework by integrating fuzzy trajectory data, unsupervised learning and supervised learning methods to predict lane-changing behaviors taking multi driving styles into account. The microscopic trajectory data from the Highway Drone Dataset (HighD) are employed to construct two types of datasets, including precise trajectory datasets and fuzzy trajectory datasets for lane-changing prediction models. The fuzzy trajectory data are developed based on different driving styles, which are clustered by the K-means algorithm. Two typical supervised learning methods, including random forest and long-short-term memory combined with convolutional neural network, are further applied for lane-changing behavior prediction. Results indicate that (1) the proposed integration approach performs better than the conventional lane-changing prediction; (2) the relative speed-related features have a greater contribution to the lane-changing prediction after being processed by fuzzy rules based on driving styles; and (3) the difference among driving styles is more reflected from the state of lateral movement rather than the lane-changing duration.
翻译:人工智能算法在智能运输领域广泛应用,特别是用于驾驶行为分析和预测。本研究提出了一个新框架,将模糊的轨迹数据、不受监督的学习和监督下的学习方法结合起来,以预测多驱动风格的车道变化行为。高空高空数据(HighD)的微镜轨迹数据被用于构建两类数据集,包括精确的轨迹数据集和路道变化预测模型的模糊轨迹数据集。模糊的轨迹数据是根据不同驾驶风格开发的,由K- means算法组成。两种典型的受监督的学习方法,包括随机森林和长期短期内存,与电动神经网络相结合,被进一步应用于改变车道行为预测。结果显示:(1) 拟议的集成方法比常规的航道变化预测要好;(2) 相对速度的特征在根据以驾驶风格为基础的模糊规则处理后,对车道变化预测做出更大的贡献;(3) 驾驶风格的差异更多地反映于车道变化的后期,而不是车道变化。