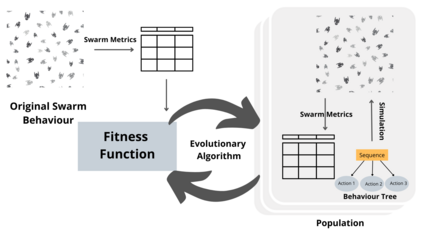
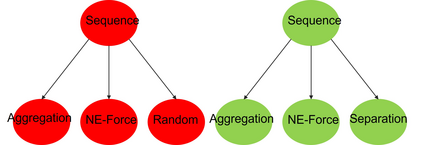
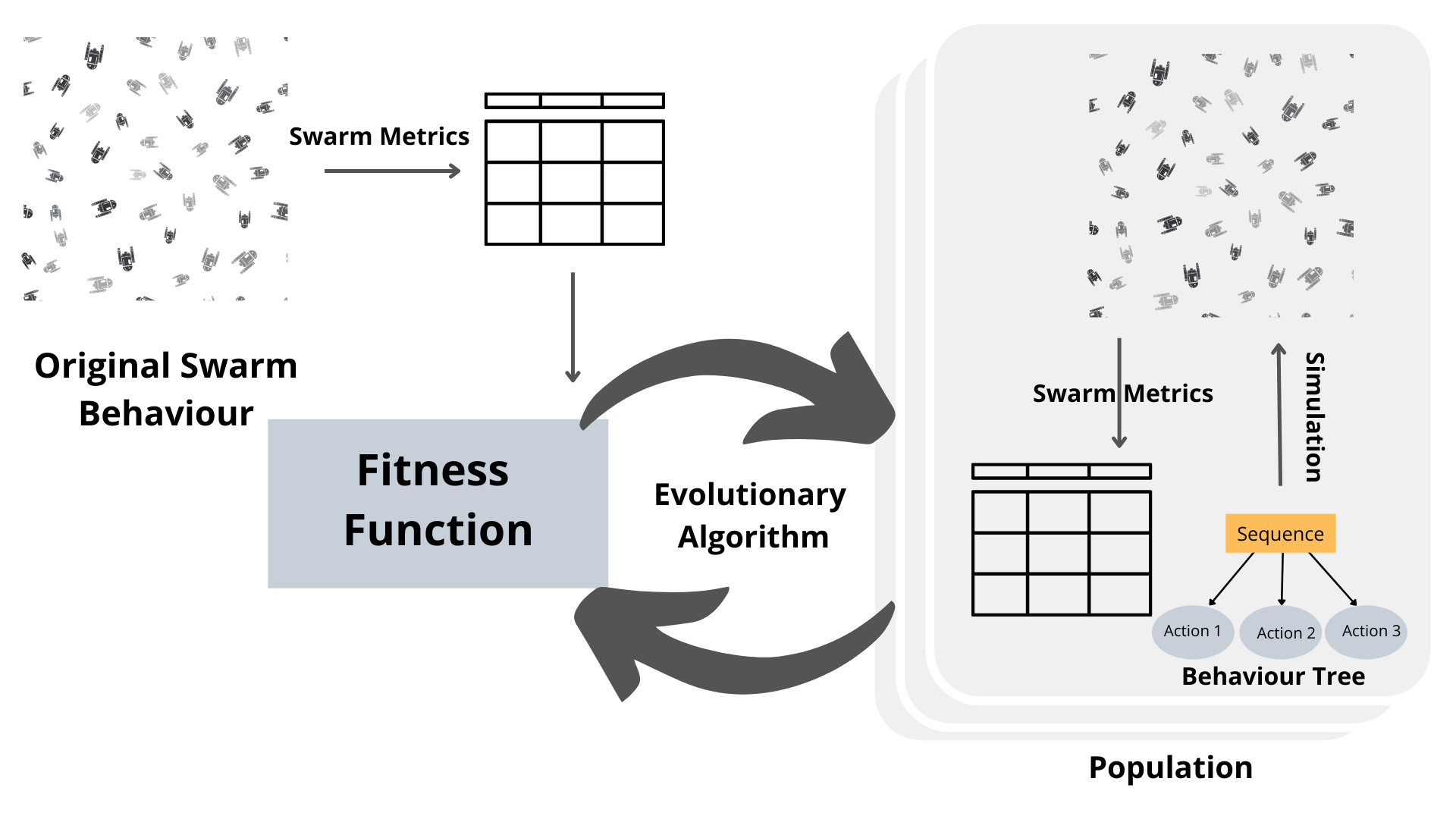
Swarm behavior emerges from the local interaction of agents and their environment often encoded as simple rules. Extracting the rules by watching a video of the overall swarm behavior could help us study and control swarm behavior in nature, or artificial swarms that have been designed by external actors. It could also serve as a new source of inspiration for swarm robotics. Yet extracting such rules is challenging as there is often no visible link between the emergent properties of the swarm and their local interactions. To this end, we develop a method to automatically extract understandable swarm controllers from video demonstrations. The method uses evolutionary algorithms driven by a fitness function that compares eight high-level swarm metrics. The method is able to extract many controllers (behavior trees) in a simple collective movement task. We then provide a qualitative analysis of behaviors that resulted in different trees, but similar behaviors. This provides the first steps toward automatic extraction of swarm controllers based on observations.
翻译:滚动行为产生于代理人及其环境的当地互动, 通常被编成简单的规则。 通过观看整个群落行为的视频来提取规则, 有助于我们研究和控制自然中的群落行为, 或者外部行为者设计的人工群落行为。 它也可以作为群落机器人的新的灵感来源。 然而, 提取这样的规则具有挑战性, 因为群落的新兴特性与其本地互动之间往往没有明显的联系 。 为此, 我们开发了一种方法, 从视频演示中自动提取可理解的群落控制器。 这种方法使用由健身功能驱动的进化算法, 与八个高层次的群群度测量仪相比较。 该方法可以在一个简单的集体移动任务中提取许多控制器( 贝哈维尔树 ) 。 我们然后对不同树木中产生的行为进行定性分析, 但相似的行为。 这为根据观察自动提取群落控制器提供了第一个步骤 。