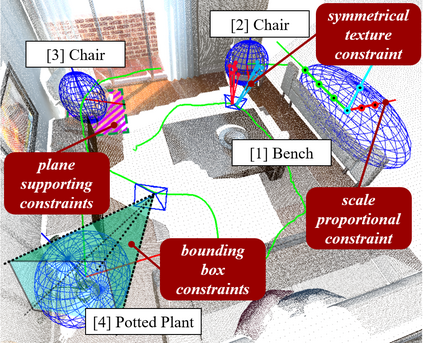
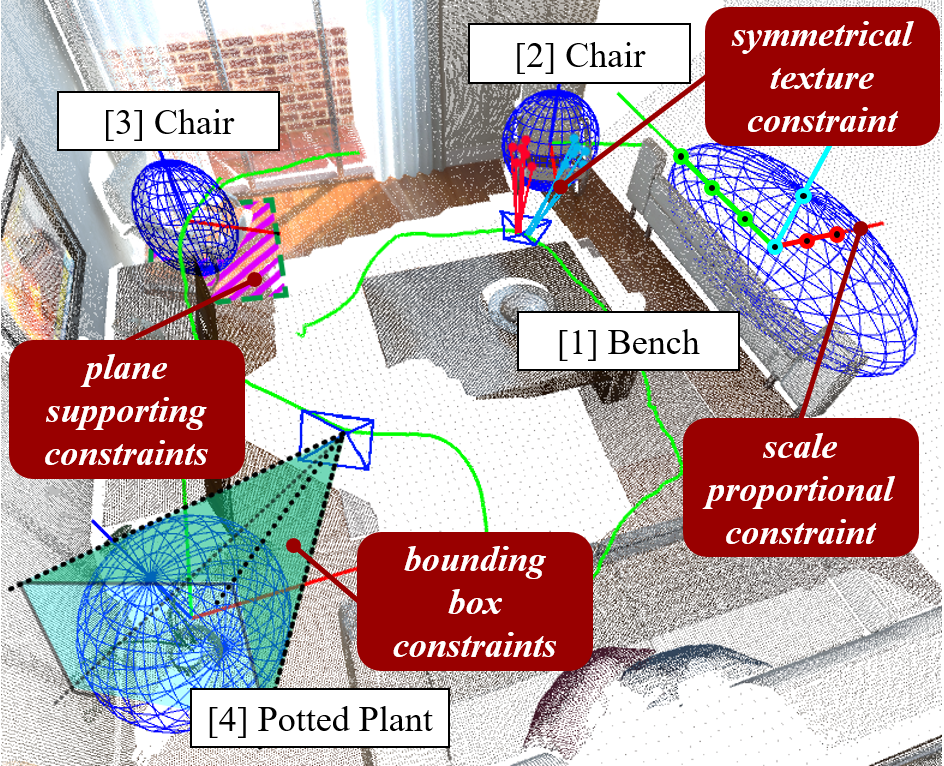
Object SLAM introduces the concept of objects into Simultaneous Localization and Mapping (SLAM) and helps understand indoor scenes for mobile robots and object-level interactive applications. The state-of-art object SLAM systems face challenges such as partial observations, occlusions, unobservable problems, limiting the mapping accuracy and robustness. This paper proposes a novel monocular Semantic Object SLAM (SO-SLAM) system that addresses the introduction of object spatial constraints. We explore three representative spatial constraints, including scale proportional constraint, symmetrical texture constraint and plane supporting constraint. Based on these semantic constraints, we propose two new methods - a more robust object initialization method and an orientation fine optimization method. We have verified the performance of the algorithm on the public datasets and an author-recorded mobile robot dataset and achieved a significant improvement on mapping effects. We will release the code here: https://github.com/XunshanMan/SoSLAM.
翻译:物体 SLAM 将物体概念引入同步定位和绘图( SLAM), 帮助理解移动机器人和物体互动应用程序的室内场景。 最先进的物体SLAM 系统面临部分观测、 隔离、 不观察问题、 限制绘图准确性和稳健性等挑战。 本文提出一个新的单项静态物体SLAM (SOS- SLAM) 系统, 解决物体空间限制的引入问题。 我们探索三个有代表性的空间限制, 包括比例限制、 对称纹理限制和平面支持限制。 基于这些语义限制, 我们提出了两种新方法---- 一种更强有力的对象初始化方法和定向优化方法。 我们核实了公共数据集算法的性能, 以及一个有作者记录的移动机器人数据集, 并在绘图效果上取得了重大改进。 我们将在此发布代码 : https://github.com/XunshandMan/ SoSLAM 。