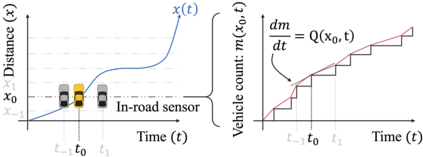
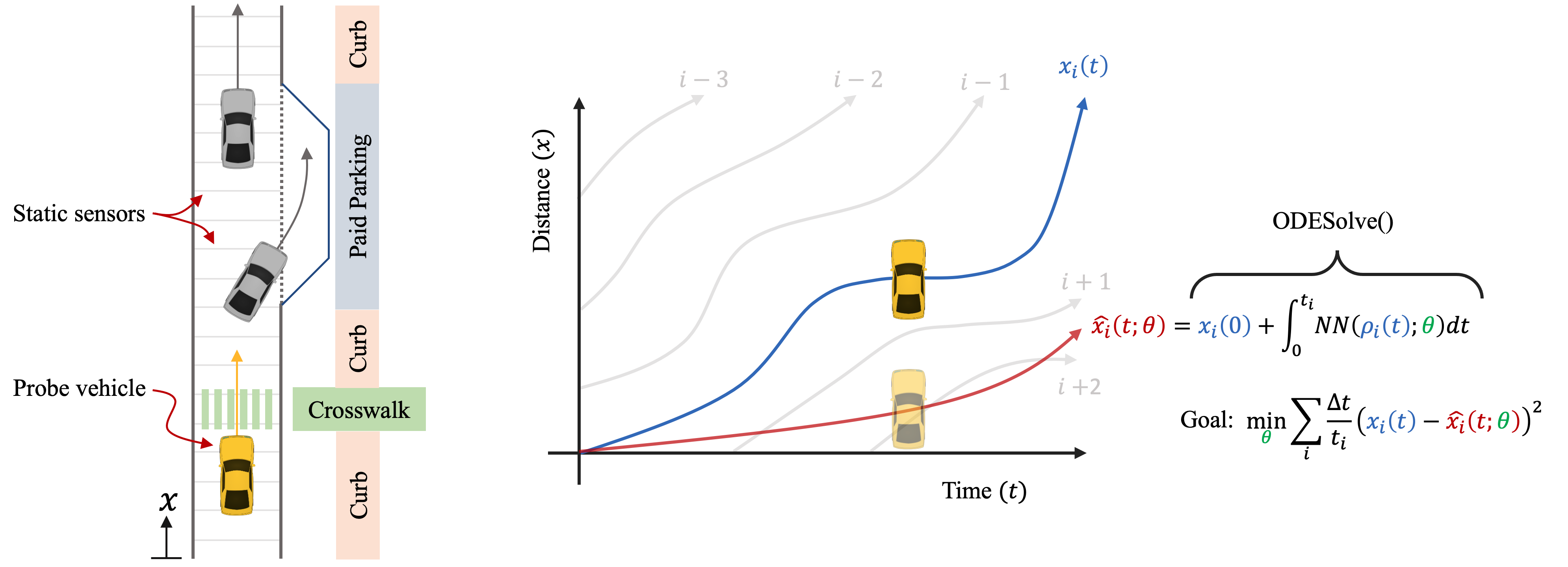
Fundamental diagrams describe the relationship between speed, flow, and density for some roadway (or set of roadway) configuration(s). These diagrams typically do not reflect, however, information on how speed-flow relationships change as a function of exogenous variables such as curb configuration, weather or other exogenous, contextual information. In this paper we present a machine learning methodology that respects known engineering constraints and physical laws of roadway flux - those that are captured in fundamental diagrams - and show how this can be used to introduce contextual information into the generation of these diagrams. The modeling task is formulated as a probe vehicle trajectory reconstruction problem with Neural Ordinary Differential Equations (Neural ODEs). With the presented methodology, we extend the fundamental diagram to non-idealized roadway segments with potentially obstructed traffic data. For simulated data, we generalize this relationship by introducing contextual information at the learning stage, i.e. vehicle composition, driver behavior, curb zoning configuration, etc, and show how the speed-flow relationship changes as a function of these exogenous factors independent of roadway design.
翻译:基本图解描述了某些道路(或一套道路)配置的速度、流量和密度之间的关系。 这些图解通常没有反映关于速度-流量关系如何变化的信息,而这种变化是限制配置、天气或其他外源、背景信息等外源变量的函数。在本文件中,我们提出了一个机器学习方法,该方法尊重已知的工程限制和道路通量的实际定律,即基本图中记录的内容,并表明如何利用这一方法将背景信息引入这些图表的生成中。模型任务被设计成一个探测车辆轨迹重建与神经普通等同(神经等同)问题(神经等同)的探测器。我们采用所采用的方法,将基本图扩展至具有潜在阻塞交通数据的非理想化道路段。对于模拟数据,我们通过在学习阶段引入背景信息,即车辆构成、驱动行为、抑制分区配置等,来概括这一关系,并显示这些外源因素的功能如何变化,而独立于道路设计。