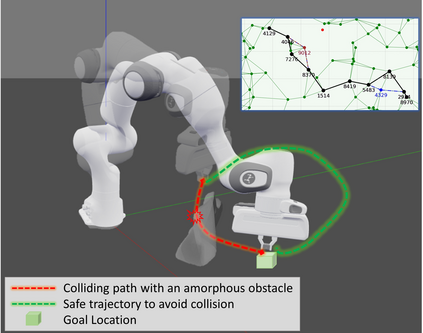
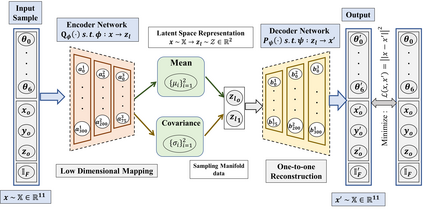
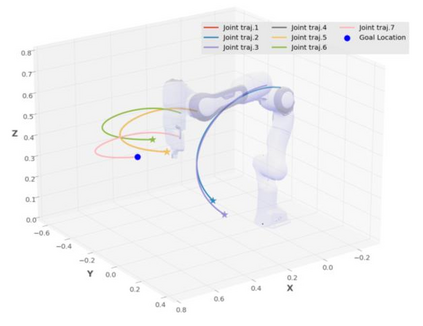
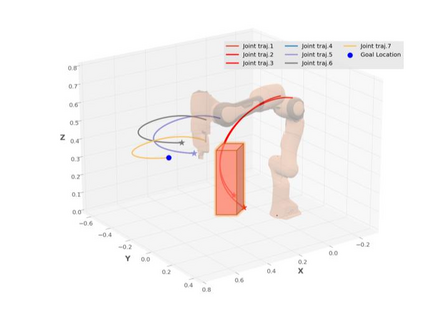
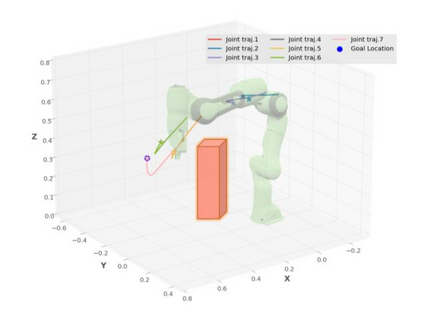
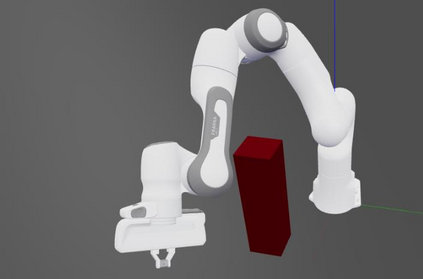
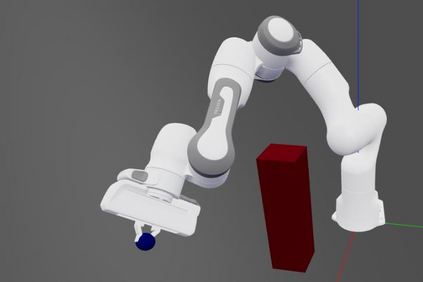
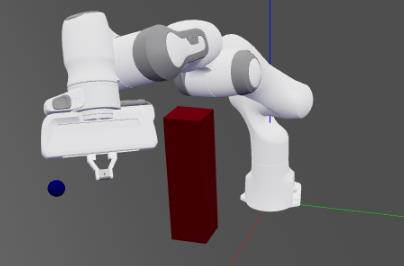
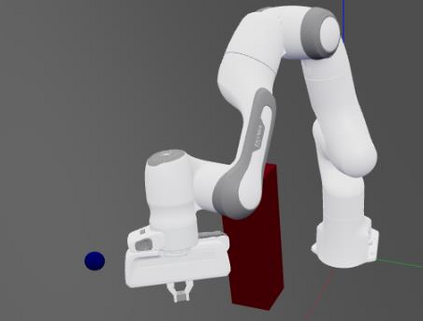
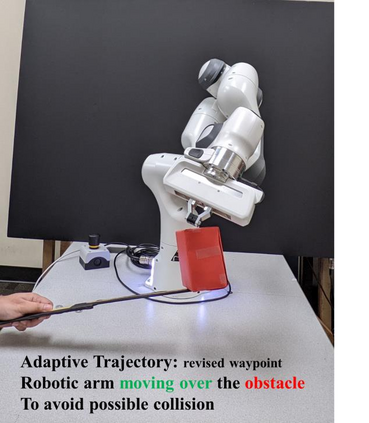
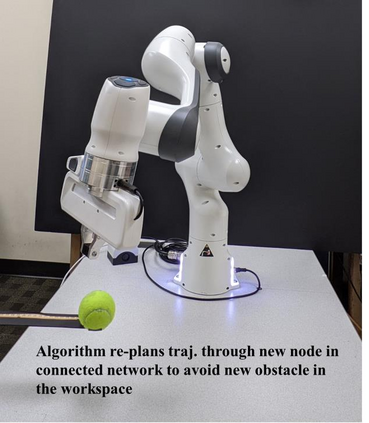
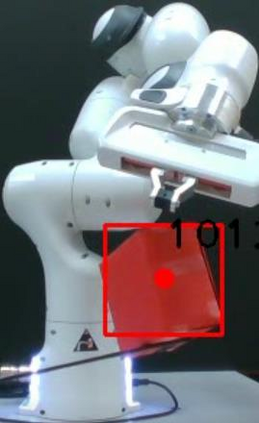
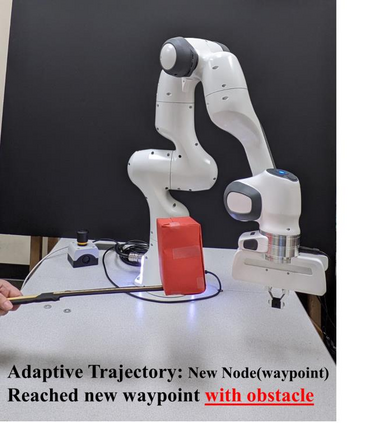
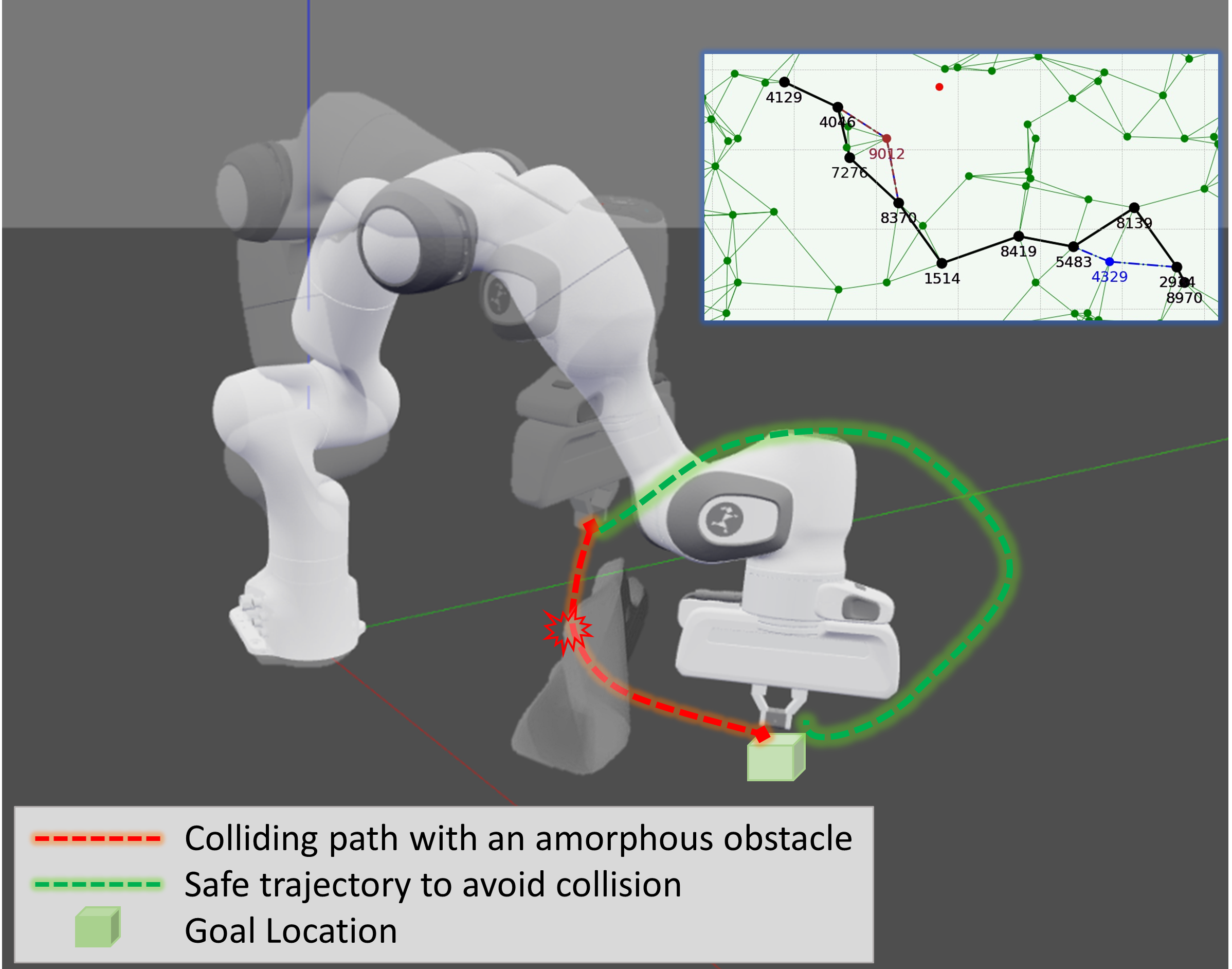
To achieve conflict-free human-machine collaborations, robotic agents need to skillfully avoid continuously moving obstacles while achieving collective objectives. Sometimes, these obstacles can even change their 3D shapes and forms simultaneously, hence being "amorphous". To this end, this paper formulates the problem of Dynamic Amorphous Obstacle Avoidance (DAO-A), where a robotic arm can dexterously avoid dynamically generated obstacles that constantly change their trajectories and their 3D forms. Specifically, we introduce a novel control strategy for robotic arms that leverages both topological manifold learning and latest deep learning advancements. We test our learning framework, using a 7-DoF robotic manipulator, in both simulation and physical experiments, where the robot satisfactorily learns and synthesizes realistic skills avoiding previously-unseen obstacles, while generating novel movements to achieve pre-defined motion objectives. Most notably, our learned methodology, once finalized, for a given robotic manipulator, can avoid any number of 3D obstacles with arbitrary and unseen moving trajectories, therefore it is universal, versatile, and completely reusable
翻译:为了实现没有冲突的人体机器合作,机器人代理器需要巧妙地避免持续移动障碍,同时实现集体目标。有时,这些障碍甚至可以同时改变其3D形状和形式,从而“畸形 ” 。为此,本文件提出了动态无差异障碍避免(DAO-A)问题,机器人臂可以灵活地避免动态产生的障碍,这些障碍不断改变其轨道和3D形式。具体地说,我们引入了机器人臂的新式控制战略,利用了顶层多式学习和最新的深层学习进步。我们在模拟和物理实验中都用7-DoF机器人操纵器测试了我们的学习框架,在模拟和物理实验中,机器人令人满意地学习和综合了现实的技能,避免了以前看不到的障碍,同时产生了实现预先确定运动目标的新动作。 最重要的是,对于某个机器人操纵器来说,我们所学过的方法一旦最后确定,就能够避免任意和无形移动轨迹的任何3D障碍,因此它是普遍的、多功能的和完全可重复使用。