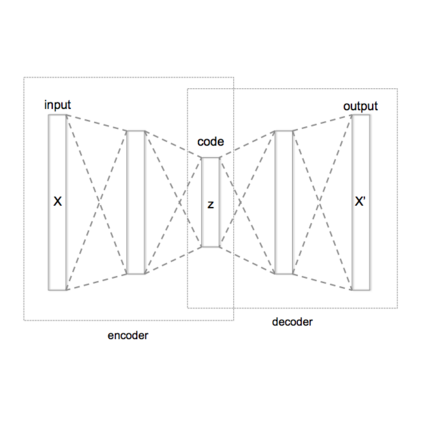
This paper examines the reconstruction of a family of dynamical systems with neuromorphic behavior using a single scalar time series. A model of a physiological neuron based on the Hodgkin-Huxley formalism is considered. Single time series of one of its variables is shown to be enough to train a neural network that can operate as a discrete time dynamical system with one control parameter. The neural network system is created in two steps. First, the delay-coordinate embedding vectors are constructed form the original time series and their dimension is reduced with by means of a variational autoencoder to obtain the recovered state-space vectors. It is shown that an appropriate reduced dimension can be determined by analyzing the autoencoder training process. Second, pairs of the recovered state-space vectors at consecutive time steps supplied with a constant value playing the role of a control parameter are used to train another neural network to make it operate as a recurrent map. The regimes of thus created neural network system observed when its control parameter is varied are in very good accordance with those of the original system, though they were not explicitly presented during training.
翻译:暂无翻译