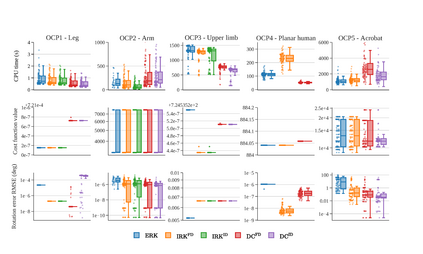
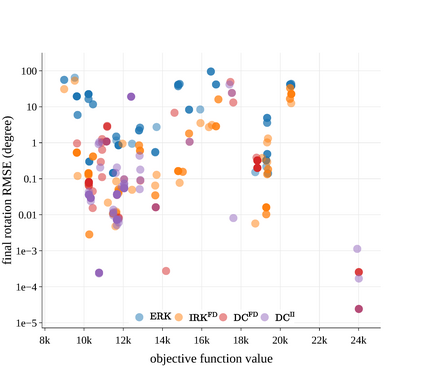
Direct multiple shooting (DMS) and direct collocation (DC) are two common transcription methods for solving optimal control problems (OCP) in biomechanics and robotics. They have rarely been compared in terms of solution and speed. Through five examples of predictive simulations solved using five transcription methods and 100 initial guesses in the Bioptim software, we showed that not a single method outperformed systematically better. All methods converged to almost the same solution (cost, states, and controls) in all but one OCP, with several local minima being found in the latter. Nevertheless, DC based on fourth-order Legendre polynomials provided overall better results, especially in terms of dynamic consistency compared to DMS based on a fourth-order Runge-Kutta method. Furthermore, expressing the rigid-body constraints using inverse dynamics was usually faster than forward dynamics. DC with dynamics constraints based on inverse dynamics converged to better and less variable solutions. Consequently, we recommend starting with this transcription to solve OCPs but keep testing other methods.
翻译:直接多射(DMS)和直接合用(DC)是解决生物机械和机器人中最佳控制问题的两个常见的抄录方法,很少在溶液和速度方面进行比较。通过使用五种转录法和Bioptim软件中100个初步猜测解决了预测性模拟的五个例子,我们显示,除了一个OCP之外,没有一种方法比其他方法更系统地表现得更好。除了一个OCP之外,所有方法都接近于几乎相同的解决办法(成本、状态和控制),在后者中也发现了几个当地迷你马。然而,基于第四级图例的DC基于第四级Runge-Kutta方法,提供了总体更好的结果,特别是动态一致性与DMS相比。此外,使用反向动态的僵硬体限制通常比前方动力更快。基于反动态的动态的动态限制都集中到更好、更不易变的解决方案。因此,我们建议从这一抄录开始解决OCP,但不断测试其他方法。