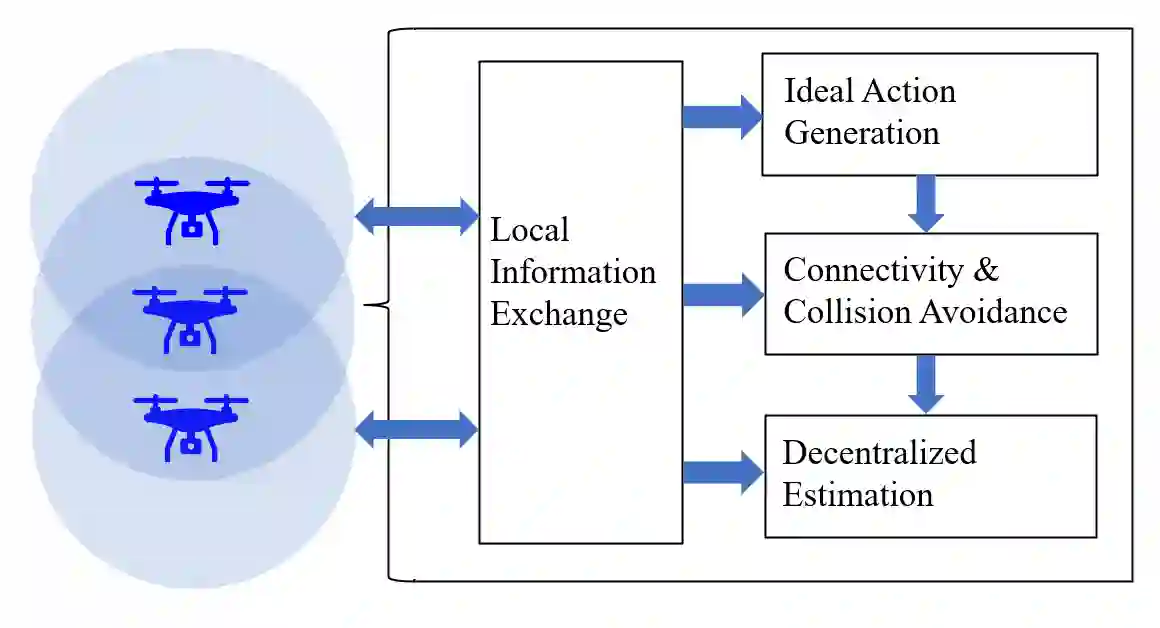
We consider the setting where a team of robots is tasked with tracking multiple targets with the following property: approaching the targets enables more accurate target position estimation, but also increases the risk of sensor failures. Therefore, it is essential to address the trade-off between tracking quality maximization and risk minimization. In our previous work, a centralized controller is developed to plan motions for all the robots -- however, this is not a scalable approach. Here, we present a decentralized and risk-aware multi-target tracking framework, in which each robot plans its motion trading off tracking accuracy maximization and aversion to risk, while only relying on its own information and information exchanged with its neighbors. We use the control barrier function to guarantee network connectivity throughout the tracking process. Extensive numerical experiments demonstrate that our system can achieve similar tracking accuracy and risk-awareness to its centralized counterpart.
翻译:我们考虑由一组机器人负责跟踪具有以下属性的多重目标的设置:接近目标可以进行更准确的目标位置估计,但也增加了传感器失灵的风险。因此,必须解决跟踪质量最大化和风险最小化之间的权衡问题。在我们以往的工作中,开发了一个中央控制器来规划所有机器人的动作 -- -- 然而,这不是一个可伸缩的方法。在这里,我们提出了一个分散的、风险意识多目标跟踪框架,每个机器人都计划将其运动交换,以追踪准确性最大化和风险转移,同时只依靠自己与邻居交流的信息和情报。我们使用控制屏障功能来保证整个跟踪过程的网络连通性。广泛的数字实验表明,我们的系统可以实现与其集中的对口系统类似的跟踪准确性和风险意识。