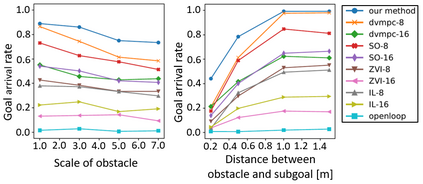
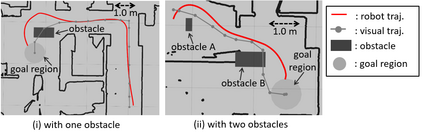
Humans can robustly follow a visual trajectory defined by a sequence of images (i.e. a video) regardless of substantial changes in the environment or the presence of obstacles. We aim at endowing similar visual navigation capabilities to mobile robots solely equipped with a RGB fisheye camera. We propose a novel probabilistic visual navigation system that learns to follow a sequence of images with bidirectional visual predictions conditioned on possible navigation velocities. By predicting bidirectionally (from start towards goal and vice versa) our method extends its predictive horizon enabling the robot to go around unseen large obstacles that are not visible in the video trajectory. Learning how to react to obstacles and potential risks in the visual field is achieved by imitating human teleoperators. Since the human teleoperation commands are diverse, we propose a probabilistic representation of trajectories that we can sample to find the safest path. Integrated into our navigation system, we present a novel localization approach that infers the current location of the robot based on the virtual predicted trajectories required to reach different images in the visual trajectory. We evaluate our navigation system quantitatively and qualitatively in multiple simulated and real environments and compare to state-of-the-art baselines.Our approach outperforms the most recent visual navigation methods with a large margin with regard to goal arrival rate, subgoal coverage rate, and success weighted by path length (SPL). Our method also generalizes to new robot embodiments never used during training.
翻译:人类可以强有力地遵循由一系列图像(即视频)所定义的视觉轨迹,而不论环境的重大变化或存在障碍。我们的目标是向仅配备 RGB 鱼眼相机的移动机器人提供类似的视觉导航能力。我们提议了一个新型的概率性视觉导航系统,它可以学习以可能的导航速度为条件,以双向视觉预测为条件,跟踪一系列图像,双向视觉预测。通过双向预测(从开始到目标,反之亦然),我们的方法从不扩展其预测性地平线,使机器人能够绕绕在在视频轨迹中无法见的看不见的大障碍周围。通过模仿人类远程操作器,可以取得类似的视觉导航能力。由于人类远程操作指令是多种多样的,我们提出了一种概率性对轨迹的描述,我们可以用可能的导航速度进行抽样,以找到最安全的道路。我们导航系统整合了一种新型的本地化方法,根据虚拟预测的轨迹轨迹,在视觉轨迹轨迹轨迹上达到不同的图像,我们用到最高级的轨迹路迹上,我们用到最高级的轨迹路迹路迹路程的方法,我们用到最高级的轨迹路路程,我们用到最精度和最精度的方法,用到最精度比。我们测量和最精度的方法,用到最精度比的轨迹路路路路路路路路路路路程,用到最精度比。我们用到最精度比,用到最精确路路路路路路路路比。我们用到最精度比。