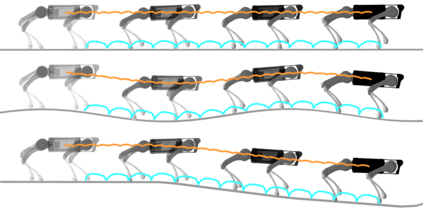
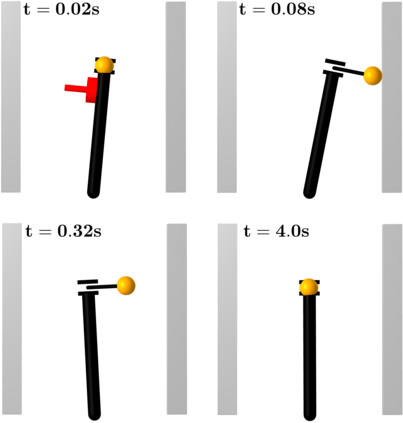
We present a general approach for controlling robotic systems that make and break contact with their environments: linear contact-implicit model-predictive control (LCI-MPC). Our use of differentiable contact dynamics provides a natural extension of linear model-predictive control to contact-rich settings. The policy leverages precomputed linearizations about a reference state or trajectory while contact modes, encoded via complementarity constraints, are explicitly retained, resulting in policies that can be efficiently evaluated while maintaining robustness to changes in contact timings. In many cases, the algorithm is even capable of generating entirely new contact sequences. To enable real-time performance, we devise a custom structure-exploiting linear solver for the contact dynamics. We demonstrate that the policy can respond to disturbances by discovering and exploiting new contact modes and is robust to model mismatch and unmodeled environments for a collection of simulated robotic systems, including: pushbot, hopper, quadruped, and biped.
翻译:我们提出了一个控制与环境发生接触的机器人系统的一般方法:线性接触暗中模型预测控制(LCI-MPC) 。 我们使用不同的接触动态为接触丰富的环境提供了线性模型预测自然延伸。 该政策利用通过互补制约编码的接触模式,明确保留了接触模式,从而能够有效地评估政策,同时保持接触时间变化的稳健性。在许多情况下,算法甚至能够生成全新的接触序列。为了实现实时性能,我们为接触动态设计了一种自定义的结构开发线性线性解决器。我们证明,该政策可以通过发现和利用新的接触模式来应对干扰,并且能够为模拟机器人系统的收集建立不匹配和非模型环境,包括:推式机器人系统、推式机械系统、四式机器人系统、双型机器人系统。