CVPR 2020 | PolarMask:将实例分割统一到FCN,有望在工业界大规模应用

CVPR 2020 在昨天刚刚公布录用结果,其中有效投稿 6656 篇,最终录用 1470 篇,接收率 22.1 % 。CVPR 2020 将于6月14日-6月19日在美国西雅图举办。
虽然在近三年来,CVPR 的论文投稿量都在持续大涨(CVPR 2018有 3300 篇有效投稿、CVPR 2019有 5160 篇有效投稿、CVPR 2020有效投稿达6656),然而在接收率方面,已是“二连降”(CVPR 2018 收录论文 979 篇、接收率为 29%左右;CVPR 2019 收录论文 1300 篇,接收率为25%左右;CVPR 2020 收录论文 1470篇、接收率为 22%左右)。
这个工作我个人觉得最大的贡献在于,把更复杂的实例分割问题,转化成在网络设计和计算量复杂度上和物体检测一样复杂的任务,把对实例分割的建模变得简单和高效。
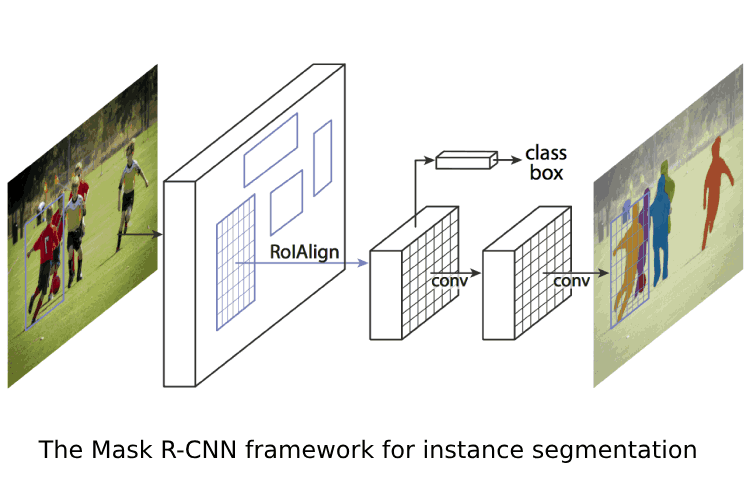
Mask R-CNN
两种实例分割的建模方式:
1、像素级建模 类似于图b,在检测框中对每个pixel分类;
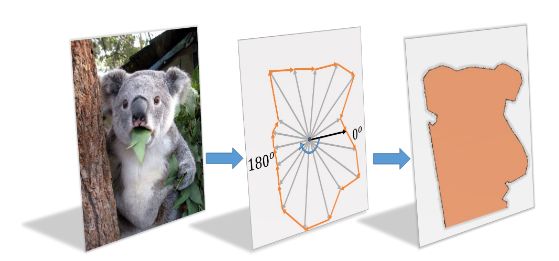
2、轮廓建模 类似于图c和图d,其中,图c是基于直角坐标系建模轮廓,图d是基于极坐标系建模轮廓。
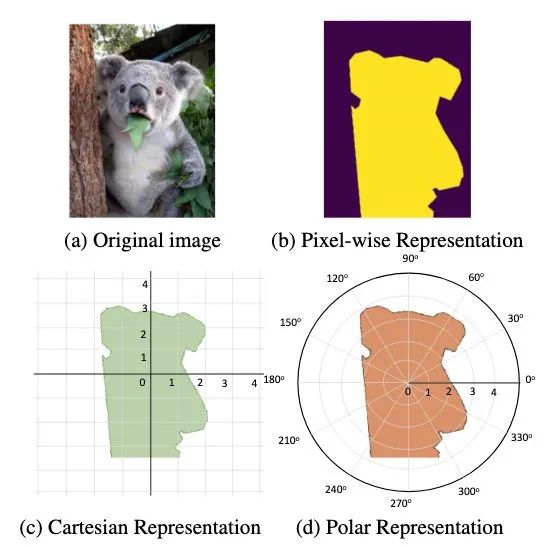
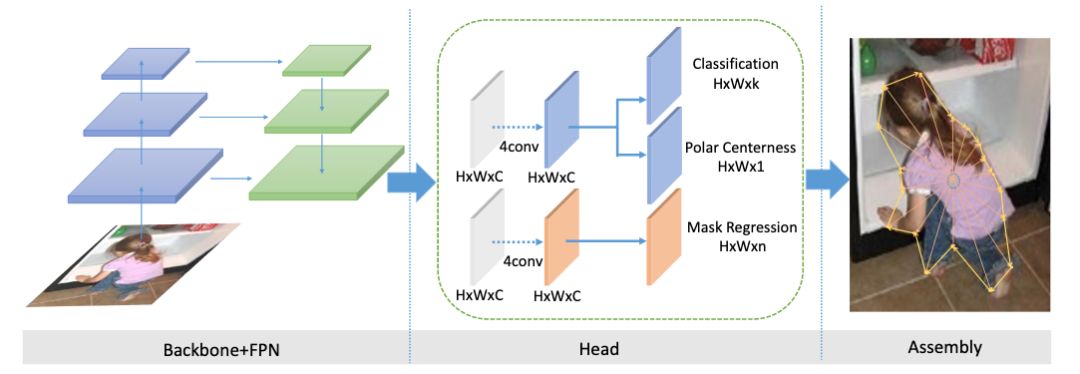
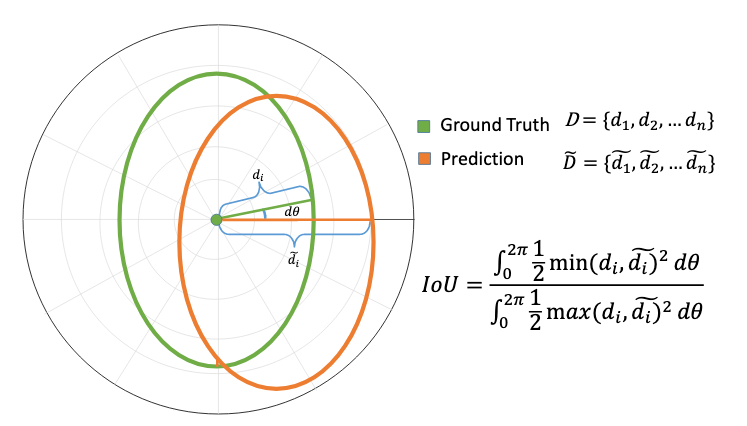
PolarMask 基于极坐标系建模轮廓,把实例分割问题转化为实例中心点分类(instance center classification)问题和密集距离回归(dense distance regression)问题。
PolarMask最重要的特点是:
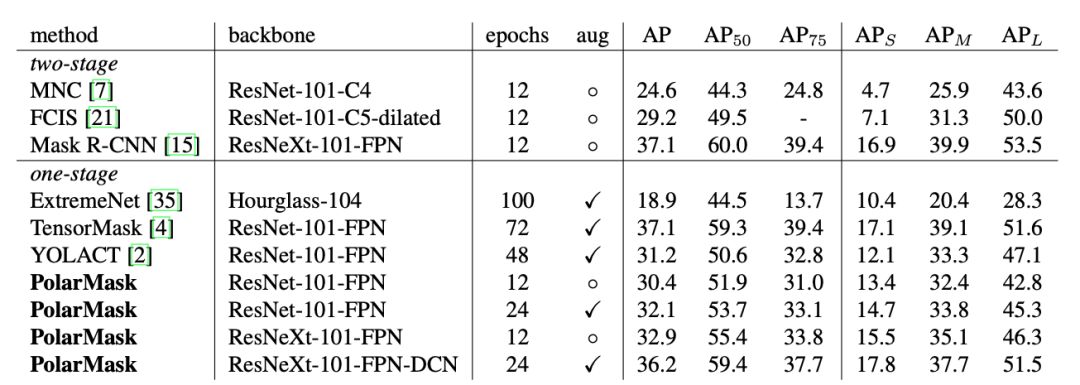
我们选取FCOS嵌入我们的方法,主要是为了simple。FCOS是目前state-of-the-art的anchor-free检测器,并且十分simple。我们在FCOS的基础上,几乎不加任何计算量,就可以建模实例分割问题,并取得competitive的性能,证明了实例分割可以简化成和目标检测相同复杂的问题。
在实验中,我们以重心为基准,assign到feature map上,会在重心周围采样,作为正样本,别的地方当做负样本,训练方式和FCOS保持一致,采用Focal Loss, 在此,我们提出Polar CenterNess,用来选择出高质量的正样本,给低质量的正样本降低权重。
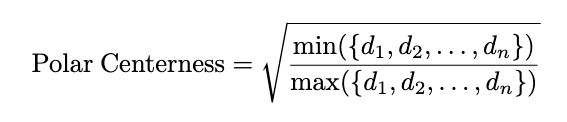
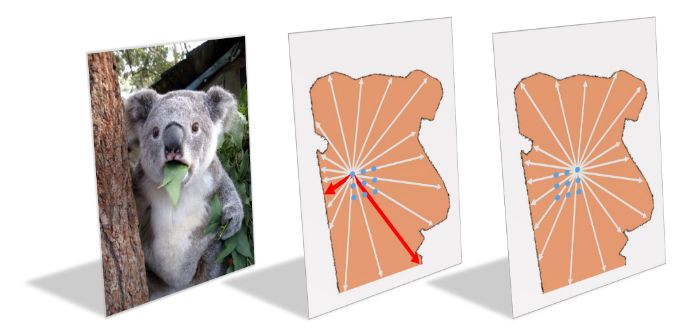
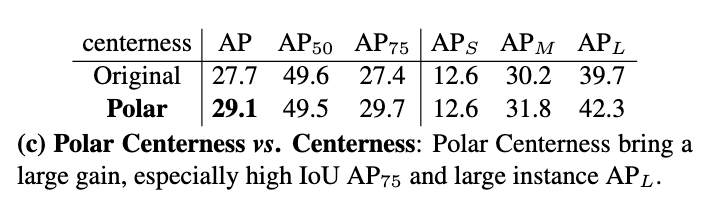
根据消融实验,Polar Centerness可以有效提高1.4的性能,同时不增加网络复杂度。结果如下图所展示
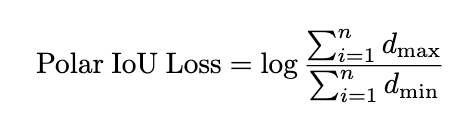
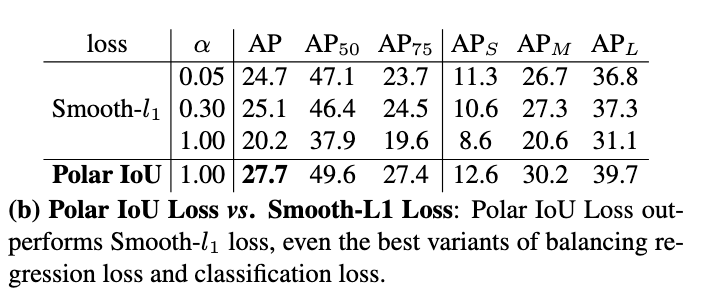
那么,Polar IoU Loss如何计算呢?如下图所展示
答案是这样,PolarMask相比Mask R-CNN这种pixel建模的方法,对于形状特别奇怪的mask的确建模会失败,但是这并不代表polarmask毫无意义。原因有两个,(1)Mask R-CNN的上限也到不了100 mAP 因为有下采样这类操作使得信息损失。(2)不管Mask R-CNN还是PolarMask,他们的实际性能距离100mAP的上限都特别远。
所以我们目前应该关注如何让实际网络性能去更好地趋近于上限。
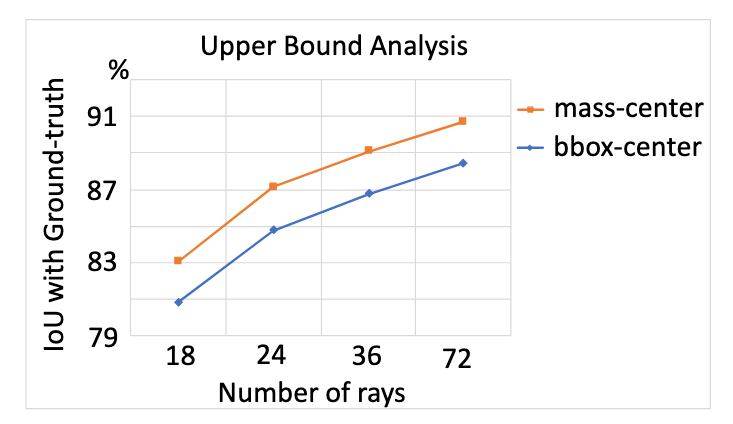
定量分析分析射线建模的上限:
登录查看更多
相关内容
Arxiv
3+阅读 · 2018年12月13日
Arxiv
5+阅读 · 2018年9月6日




相关VIP内容
相关资讯
相关论文
Arxiv
3+阅读 · 2018年12月13日
Arxiv
5+阅读 · 2018年9月6日