论文阅读笔记|移动群智感知任务优化分发——基于移动模式匹配视角
点击蓝字

关注我们
今天,FCS给大家分享一篇智慧城市与城市计算专栏论文——《Mobile crowd sensing task optimal allocation:a mobility pattern matching perspective(移动群智感知任务优化分发——基于移动模式匹配视角)》的读者给我们带来的论文阅读笔记。如果您也同样对这篇论文感兴趣,或者也想把您阅读我们期刊论文的感受分享给更多的小伙伴,欢迎在文后留言或者与我们联系。
原文信息:
Mobile crowd sensing task optimal allocation: a mobility pattern matching perspective
Frontiers of Computer Science,2018,12(2):231-244
Liang WANG, Zhiwen YU, Bin GUO, Fei YI, Fei XIONG
01
移动群智感知
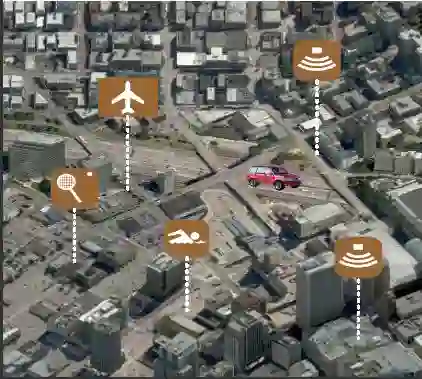
移动群智感知(Modile CrowdSensing,简称MCS)是指通过利用嵌入在手机等设备中的传感器在人们移动过程中收集周围数据,这一技术随着大量嵌入传感器的移动设备的应用而得到了前所未有的发展。但如何确定执行收集任务的人选是一个关键性问题,这其中既要保证数据的可靠性,同时还要尽可能地控制成本。举个例子来说明这个问题:

如图1所示,现在有三个用户








02
表征移动模式
在现实生活中,人们的移动行为在某种程度上通常会表现出一种重复性规律,通过观察用户的移动记录,就可以统计和提取出每个人的移动规律。
首先定义一些概念来阐述移动规律性。观察用户移动轨迹的时间间隔被定义为观察周期P,它被划分为许多不重叠的周期,长度为
如果一个行为在









重复性移动模式的发现
对于每一个用户,我们首先建立一个包含其移动规律性的移动子空间Ω,然后对N个不重叠周期进行多次扫描,识别出该用户频繁访问的热点位置,这样,1长度的重复模式就记录好了,例如
有了移动模式之后需要进行的就是基于模式匹配的任务分配了。
03
基于模式匹配的MCS任务分配
问题描述
移动用户被定义为集合





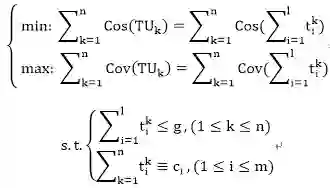
根据发现的用户移动模式,MCS平台希望把任务分配给合适的用户,目标是最小化感知成本和最大化数据质量。在该优化问题中同时存在着两个限制条件:用户的能力有限,需要给每个用户限制一个最大工作量,为了简化问题,在本文中设定为常数g;为了保证数据可靠性,对于每个任务收集不止一个样本,在本文中,我们假设每一份任务

对于移动用户







这样,问题就可以被公式化地定义如下:
问题转换
根据经济学中的规模效应,如果用户被分配的任务越多,那么每个任务的成本则会相应地下降,换句话说,这相当于要实现和移动模式匹配更长的任务序列分配,但是规模过大也有可能导致信息失真,因为长移动模式相比较于短移动模式的重复率要低,这将体现在支持度这个指标上。我们可以将原来的优化目标转换为另一种形式:
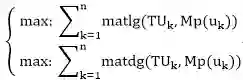
其中,和分别表示分配给用户的感知任务和他的重复性移动模式之间的匹配长度和匹配支持度。
最优化任务分配方案
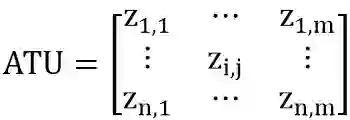
(1)分配方案结构
对于一个给定的MCS感知任务集合
 ,
,
 ;否则反之。第i行的元素总和代
;否则反之。第i行的元素总和代

 ,其中每一个任务都只有一个独立的测量。然后,在发现的重复性移动模式中搜寻和
中的任务序列相匹配的模式,如果
,其中每一个任务都只有一个独立的测量。然后,在发现的重复性移动模式中搜寻和
中的任务序列相匹配的模式,如果




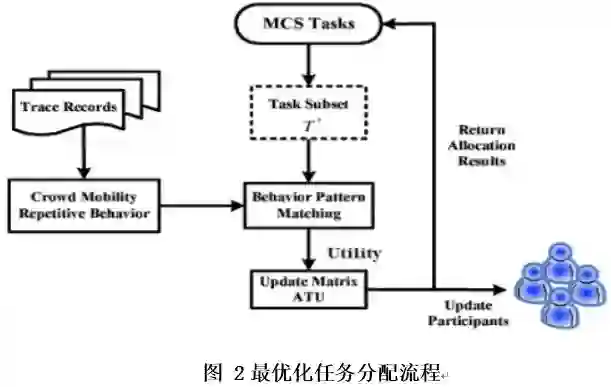
(3)任务分配策略
基于匹配长度(

①匹配长度优先(MLP)
匹配长度(matlg)优先,matlg值更大的模式的匹配程度将会更高,换句话说,这种策略只考虑最小化感知成本预算这个目标,不考虑任务覆盖度指数。
②匹配度优先(MDP)
这种策略和MLP截然相反。这种策略的关注点放在了覆盖度指数上,因此一个有着更大匹配支持度(matdg)的模式将更有可能被使用。
③综合考虑-1(IU1)
这种策略会同时考虑两种优化目标,我们将覆盖度作为一个预先确定的阈值来优化感知成本目标。对于任何两个匹配模式而言,任何一个的matdg值如果小于阈值∂就会被排除。如果这两个候选模式的支持值都大于∂,那么有着更大匹配长度(matlg)的就模式将会被选为最终分配方案。
④综合考虑-2(IU2)
和上一种策略相似,这种策略也综合考虑两个优化目标,它使用matlg*matdg这个优化指标,有着最大的matlg*matdg值的候选模式将被选为最终分配方案。
04
实验效果
数据集
本文使用由UCSD的研究人员发布的公开WTD数据集作为实验数据集。由于数据集的分布比较稀疏,通过对于数据的过滤得到了一个包含124个接入点和68个用户的真实数据集。为了在一个更大规模数据集上更加全面地验证我们提出的方案,我们根据实际数据拟合出了一套模拟数据集,又额外增加了100个虚拟移动用户,即有168个用户,并且相关的接入点也增加到了284。
实验结果
本文从更改感知任务数、更改最大工作量、任务分配效率、任务完成比率四个角度分别对上述四种策略进行了比较和评估。在每个用户平均分配的任务数上MLP最优,而在每个任务的平均覆盖度上MDP最优,IU1和IU2介于上述二者之间。在任务分配效率上MLP最优,因为它采用的是最长模式匹配策略,在每一轮迭代中可以给一个用户分配尽可能多的任务。而在任务完成率上,MDP表现最佳,因为对于移动预测的准确性将会直接影响任务的完成度,其他更为详细的实验结果,请参考原文。
长按识别二维码,阅读文章详情
05
总结
本文在MCS任务分配问题上提出了参考用户移动模式的假设,将用户移动模式和分配任务序列进行匹配,在数据可靠性和成本可控性两个指标的权衡上提出了四种策略,并通过具体实验证明了其方案的有效性。
注:本文为该读者的阅读笔记,未经原论文作者和FCS期刊审读。仅供广大读者参考。
了解原论文内容,请点击下方链接:
FCS 12(2) 智慧城市与城市计算专栏 | 移动群智感知任务优化分发——基于移动模式匹配视角
Frontiers of Computer Science


长按二维码关注Frontiers of Computer Science公众号