【泡泡图灵智库】基于智能手机的行人室内建图与定位(IROS)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:Indoor Mapping and Localization for Pedestrians using Opportunistic Sensing with Smartphones
作者:Qing Liang, Lujia Wang, Youfu Li, and Ming Liu
来源:IROS 2018
编译:皮燕燕
审核:杨小育
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——基于智能手机的行人室内建图与定位,该文章发表于IROS 2018。
在过去十年里,关于行人室内导航的研究日益成为研究热点。该文章提出了一种低成本的室内建图和定位解决方案,本文提出了一种低成本的基于室内环境信和智能手机传感器信息的室内建图和定位方案。改解决方案由基于GraphSLAM的离线建图和基于贝叶斯滤波的在线定位组成。GraphSLAM前端由行人航位推算(PDR)的运动约束构成,通过磁序列和WiFi信号相似性的匹配验证回环约束。而排除误差后的机会磁力形成观测约束。通过图优化创建全局一致的轨迹,之后通过高斯过程回归(GPR)生成 信号图(例如,WiFi,磁场,光)以用于后续的定位。文章建议使用来自磁场的GPR方差图的伪墙约束和光测量作为粒子滤波的观测。所提出的方法在若干个数据集上进行了评估,这些数据集采集于办公楼和外部公共区域环境。在办公楼内的定位会实时显示在智能手机上,建筑物覆盖2000平方米,50%和90%的精度分别是2.30米和3.41米。
主要贡献
1.提供了基于磁匹配的闭环检测和GrapSLAM前端结构的机会磁航向测量的WiFi信号相似性验证
2.提供了来自生成磁场的GPR方差图和基于粒子滤波的定位的光测量伪墙约束。
3.实施所提出的建图和定位系统,通过该系统实现全局一致的实时建图和定位。
算法流程
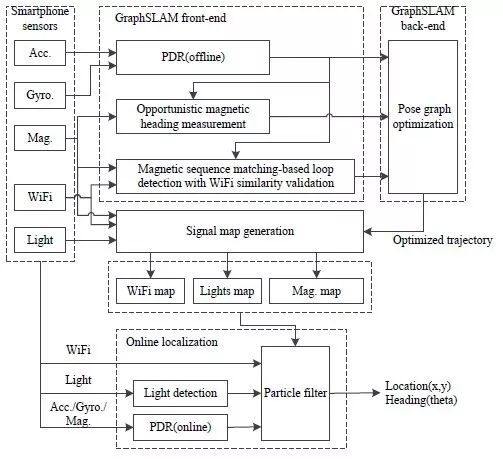
图1 算法框图
1、基于感知的GraphSLAM离线建图
A. PDR:在本文的方案中,PDR获得的姿态信息被大量用于构建GraphSLAM前端,因为它们提供信息性运动模式以辅助磁性序列分割,机会性磁航向测量和姿态图生成的运动约束。
B. 基于磁链序列匹配的环路闭环检测与WiFi相似性验证:
1)转动检测和磁序分割:
根据检测到的转折点将磁场序列切成多个段。 为了减少不匹配,仅选择那些信息段,具有足够的行进距离和显着的信号变化。
2)使用磁匹配进行闭环检测:
由于行走速度和采样频率的变化,磁信号受到空间采样密度变化问题的影响。 为了解决这个问题,我们使用动态时间规整(DTW)来匹配这些磁性序列。
3)使用WiFi相似性的循环闭环验证:
具有异常的磁信号本质上是缺乏全局唯一性的局部特征。 在大规模环境中,磁匹配可能遭受越来越多的误报。 太多误报可能会破坏优化结果。 重要的是减少误报,同时保持尽可能多的正确性。 受两种信号模态的互补性质的启发,本文建议使用WiFi信号相似性作为辅助工具来帮助识别来自磁匹配的不正确的环路闭锁。
C.优化磁航向检测如下图算法1所示。

D.姿态图优化
本文使用g2o 来实现图优化。 即使在大规模环境中进行全局约束验证之后,仍然存在误报循环。 利用强大的内核来解决g2o中的这个问题。
E.单一地图生成
考虑到壁约束粒子滤波器在降低PDR漂移方面具有显著的效果,本文建议使用生成的磁方差图作为伪平面图来帮助进行定位。
2、使用信号地图进行粒子滤波定位
A.伪墙和灯光约束
除了来自磁方差图的伪墙约束,沿着灯的光走廊对粒子的步长提供了更多限制,有助于加速粒子滤波器的收敛。 图2展示了墙约束和光约束如何对航向和步长估计起作用。
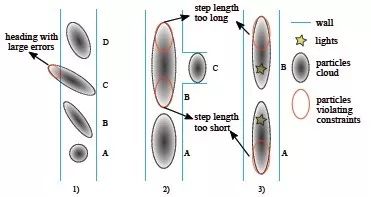
图2:1)具有较大航向误差的颗粒撞击墙壁并在从A变为D时消亡; 2)转弯时,步长太长或太短的颗粒撞到墙上; 3)违反光约束的粒子在每次光检测事件中消亡。
B.粒子过滤
本文适使用基本的粒子过滤程序。 初始化,权重更新。
主要结果
从各种室内环境收集六个数据集,包括香港科技大学校园内的办公楼和外面的购物中心,步行轨迹持续10分钟至20分钟,覆盖范围约为2000平方米至4000平方米。 Android智能手机(三星Galaxy S5型号)用于本文的数据收集和本地化评估。 要求试验人员简单地拿着电话走路。
1、建图结果
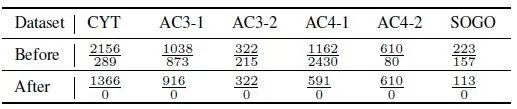
1)具有验证的闭环检测:使用最终优化的轨迹作为基础事实,对于每个数据集的每个数据集的真阳性(TPs)的假阳性(FPs)的总数,在表1中总结了关于环路正确性的统计。
表1:在WiFi相似性有效之前和之后检测到的闭环的TPs / FPs的统计结果
2)轨迹估计:如图3所示,在没有磁场测量的情况下,优化的轨迹未与地球框架正确对准。 在某些情况下,它们甚至不是全局一致的,因此它们对信号图生成毫无用处。 然而,最终优化的轨迹显示出与物理平面图相当的一致性。
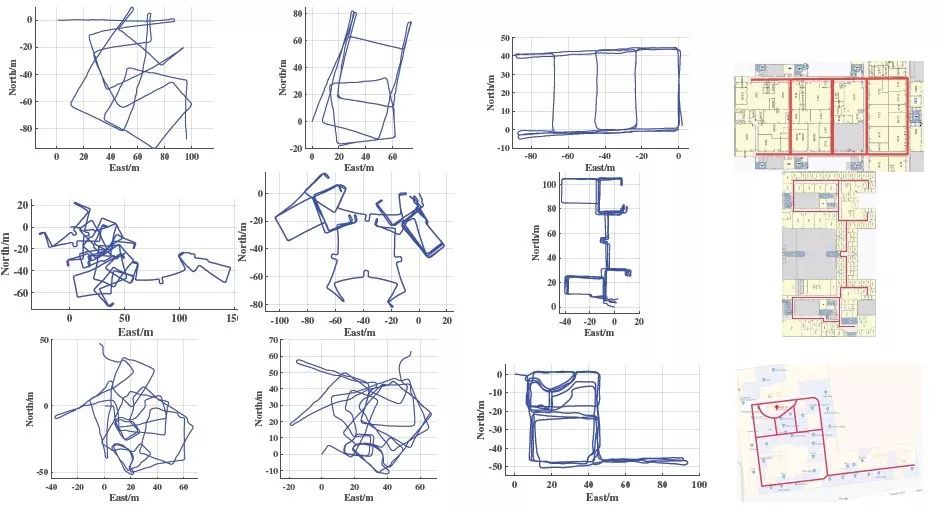
图3 从上到下:AC3-2,AC4-1和SOGO。 从左到右:1)优化前的原始PDR导出轨迹,2)优化轨迹而不包含磁航向测量,3)通过所提出方法的最终优化轨迹,以及4)图规划上的参考路径。 平面图仅用于本文的视觉化。
由于缺乏路径的基本数据,我们将“用户如何正确返回原点”描述为返回原点误差(ROE)。 统计数据见表2。
表2:ROE误差的统计结果

2、定位结果
我们观察到Tango路径中的明显漂移,如图4a中放大的视图所示,而所提出的方法的结果在走廊区域受到很好的约束。 这表明所提出的具有信号图的粒子滤波方法可以实现随时间的一致定位。 没有光约束的定位如图4b所示。 性能下降是由于对步长缺乏足够的约束。
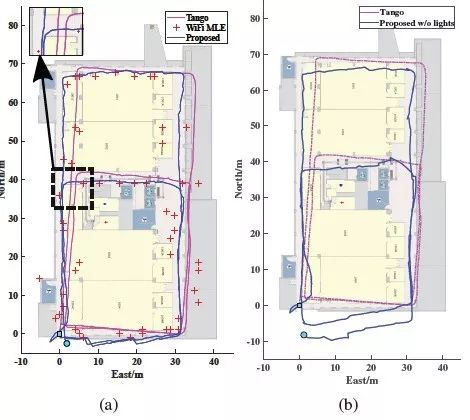
图4:用(a)和没有(b)光测量的定位结果的图示。 测试步行来自左下角,方形标记起点,圆圈标记端点。
我们沿着走廊放置了25个检查点,并使用平面布置图得出了它们的地面实况位置。 然后生成累积分布函数图(CDF)用于误差分析,如图5所示。表3总结了50百分位和90百分位的精度,用于三种定位算法,即WiFi MLE,没有光和没有光的粒子滤波测量。
表3:定位准确度统计结果
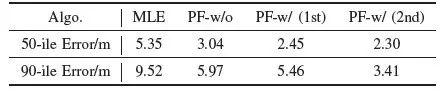
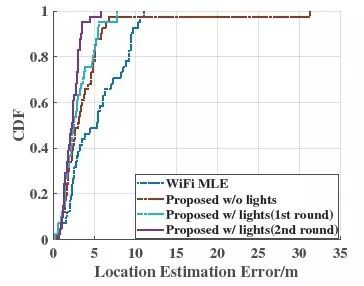
图5 定位误差CDF

Abstract
Indoor localization for pedestrians has gained increasing popularity among the rich body of literature for the last decade. In this paper, a low-cost indoor mapping and localization solution is proposed using the opportunistic signals from ambient indoor environments with a smartphone. It is composed of GraphSLAM-based offline mapping and Bayesian filtering-based online localization using generated signal maps. The GraphSLAM front-end is constructed by motion constraints from pedestrian dead-reckoning (PDR), loop-closure constraints identified by magnetic sequence matching with WiFi signal similarity validation, and observation constraints from opportunistic magnetic headings after error rejection. Globally consistent trajectories are created by graph optimization, after which signal maps (e.g., WiFi, magnetic fields, lights) are generated by Gaussian Processes Regression (GPR) for later localization. We propose to use the pseudo-wall constraints from the GPR variance map of magnetic fields and the lights measurements as observations for particle filtering. The proposed method is evaluated on several datasets collected from both the in-compass office buildings and outside public areas. Real-time localization is demonstrated on a smartphone in an office building covering 2000 square meters with the 50- and 90-percentile accuracies being 2.30 m and 3.41 m, respectively.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




