ICLR2022:清华、腾讯AI Lab共同提出等变图力学网络,实现多刚体物理系统模拟
清华 AIR、计算机系与腾讯 AI Lab 合作,共同提出等变图力学网络,实现了理论力学中的一类重要任务—多刚体系统模拟。
论文地址:https://openreview.net/forum?id=SHbhHHfePhP
开源代码:https://github.com/hanjq17/GMN
 。
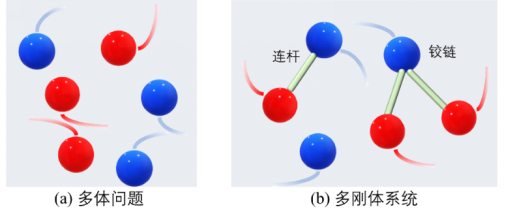
因为存在棍子长度约束,所以两个球的运动过程中需要满足两者相对距离不变;
换句话说,利用笛卡尔坐标系表示系统的状态,需要引入额外的约束条件,不便于采用神经网络来端到端地表征系统演化规律。
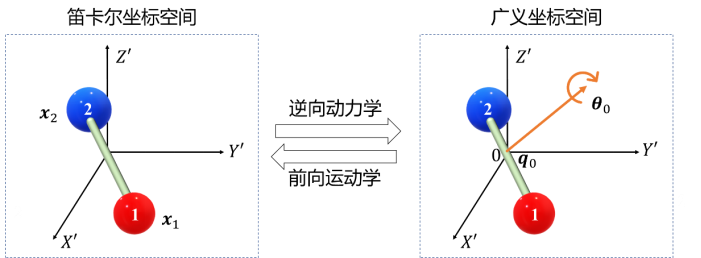
为了克服这个困难,我们引入广义坐标系。
如图 2 右子图所示,可以通过棍子的中心 0 点的笛卡尔坐标
。
因为存在棍子长度约束,所以两个球的运动过程中需要满足两者相对距离不变;
换句话说,利用笛卡尔坐标系表示系统的状态,需要引入额外的约束条件,不便于采用神经网络来端到端地表征系统演化规律。
为了克服这个困难,我们引入广义坐标系。
如图 2 右子图所示,可以通过棍子的中心 0 点的笛卡尔坐标
 ,以及棍子的相对转角
,以及棍子的相对转角
 ,来表示棍子的状态。
同时,
,来表示棍子的状态。
同时,
 可以独立变化,始终不改变棍子的长度,特别利
于使用神经网络进行建模。
可以独立变化,始终不改变棍子的长度,特别利
于使用神经网络进行建模。
 ,即,每两个球的受力与其相对距离
,即,每两个球的受力与其相对距离
 有关。
有关。
 上所有受力及其
分布,我们计算广义坐标的加速度为:
上所有受力及其
分布,我们计算广义坐标的加速度为:
 ,
,
 是相对位置,
是相对位置,
 是相对速度。
直观上,这个公式是
基于刚体上每个球的受力及其在刚体局部坐标下(也就是广义坐标系)的状态推算出广义坐标系的加速度。
是相对速度。
直观上,这个公式是
基于刚体上每个球的受力及其在刚体局部坐标下(也就是广义坐标系)的状态推算出广义坐标系的加速度。
 。
。
 。
需要指出的是,FK 可以是手工设置(Hard version),保证笛卡尔坐标更新始终满足约束;
FK 也可以是自动学习的(Soft version),从数据中学习约束,但是不能精确保证约束条件。
。
需要指出的是,FK 可以是手工设置(Hard version),保证笛卡尔坐标更新始终满足约束;
FK 也可以是自动学习的(Soft version),从数据中学习约束,但是不能精确保证约束条件。
 ,
和广义
坐标
角度
,
和广义
坐标
角度
 。
读者可以通过查阅原论文得到更多这方面的细节。
。
读者可以通过查阅原论文得到更多这方面的细节。
 。
不失一般性,我们记正交等变函数
。
不失一般性,我们记正交等变函数
 。
我们定义,
。
我们定义,
 为参数是
为参数是
 的任意多层感知机(MLP)。
很容易可以证明上述定义的等变性,即对于任意正交矩阵
的任意多层感知机(MLP)。
很容易可以证明上述定义的等变性,即对于任意正交矩阵
 。
实际上,我们这里的定义是 EGNN[1]的更一般形
式,从向量形式扩展为矩阵形式。
。
实际上,我们这里的定义是 EGNN[1]的更一般形
式,从向量形式扩展为矩阵形式。
 ,行满秩,即
,行满秩,即
 ,那么对于任意连续的正交等变函数
,那么对于任意连续的正交等变函数
 ,一定存在某个
,一定存在某个
 使得
使得
 充分逼近
充分逼近
 ,即,
,即,
 任意小。
任意小。




© THE END
转载请联系本公众号获得授权
投稿或寻求报道:content@jiqizhixin.com
登录查看更多
相关内容



相关VIP内容
相关资讯
相关论文