54.7 AP!最强的目标检测网络:DetectoRS(已开源)
点击上方“CVer”,选择加"星标"置顶
重磅干货,第一时间送达

前言
上个月刚整理好一篇:大盘点 | 性能最强的目标检测算法,今天数据就要再次更新了,DetectoRS直接将COCO上之前霸榜的53.3 AP刷到了54.7 AP!暴涨1.4 AP,太恐怖了。同时还拿下COCO实例分割并列第一(47.1%),COCO全景分割第一(49.6 AQ)
值得提一下,目前COCO 目标检测霸榜的前三:DetectoRS、ResNeSt和CBNet 都主要在backbone上面花了很大功夫!
这里再简单提一下(帮大家回忆),近期比较"知名"的目标检测项目:EfficientDet、YOLOv4、YOLOv5、CBNet、TSD和ResNeSt等
根据目前"学术论文"情况,Amusi 将在COCO数据集上 AP 最高的算法认为是"性能最强"目标检测算法(不严格区分单尺度/多尺度训练,只看现有的公开数据)
DetectoRS
作者团队:约翰斯·霍普金斯大学&谷歌
论文:https://arxiv.org/abs/2006.02334
代码(基于mmdetection):
https://github.com/joe-siyuan-qiao/DetectoRS
许多现代目标检测器通过使用两次looking和thinking的机制,表现了出色的性能。在本文中,作者探索了用于目标检测的backbone设计中的这种机制。
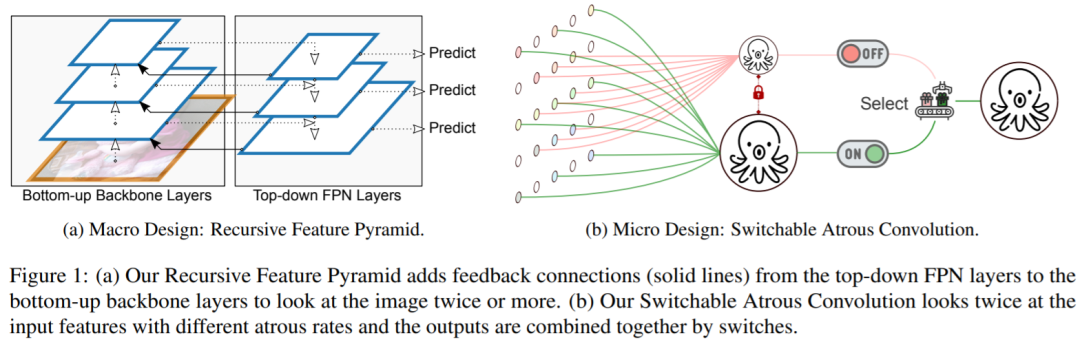
在宏观层面上,作者提出了递归特征金字塔(RFP,Recursive Feature Pyramid),它结合了从特征金字塔网络到自下而上的backbone层的额外反馈连接,具体如图1(a)所示。
在微观层面上,作者提出了可切换的空洞卷积(SAC,Switchable Atrous Convolution),它以不同的atrous rate对特征进行卷积,并使用switch函数收集结果,具体如图1(b)所示。
将它们组合在一起将产生DetectoRS,这将大大提高目标检测的性能。
DetectoRS = Detector + RFP + SAC = Detector + Recursive Feature Pyramid + Switchable Atrous Convolution
注:DetectoRS中使用的Detector是 HTC(关于HTC,详见CVPR2019 | 实例分割的进阶三级跳:从 Mask R-CNN 到 Hybrid Task Cascade)
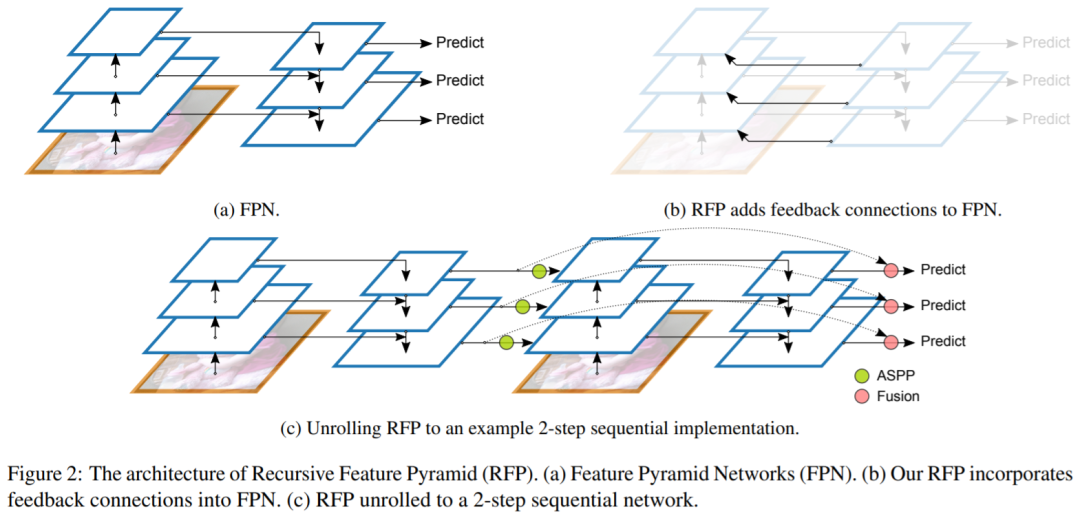
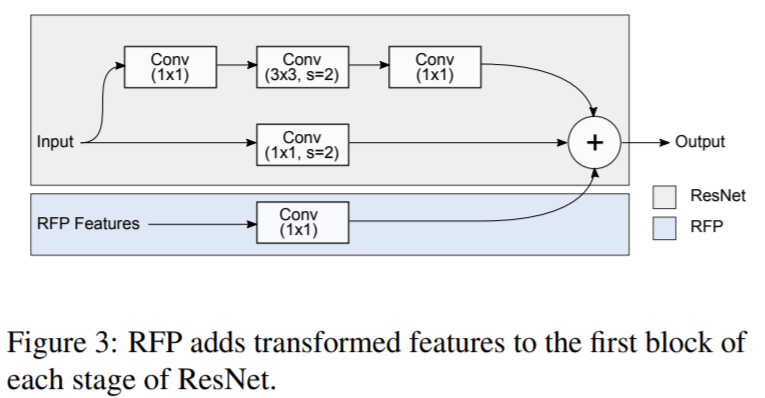
RFP(递归特征金字塔)
RFP(递归特征金字塔)= Recursive Structure + Bottom-up Backbone Layers + Top-down FPN Layers,作者称实现了 looking and thinking twice or more
SAC(可切换的空洞卷积)
SAC(可切换的空洞卷积)= Different atrous rates + Switch functions,作者称实现了 looking and thinking twice
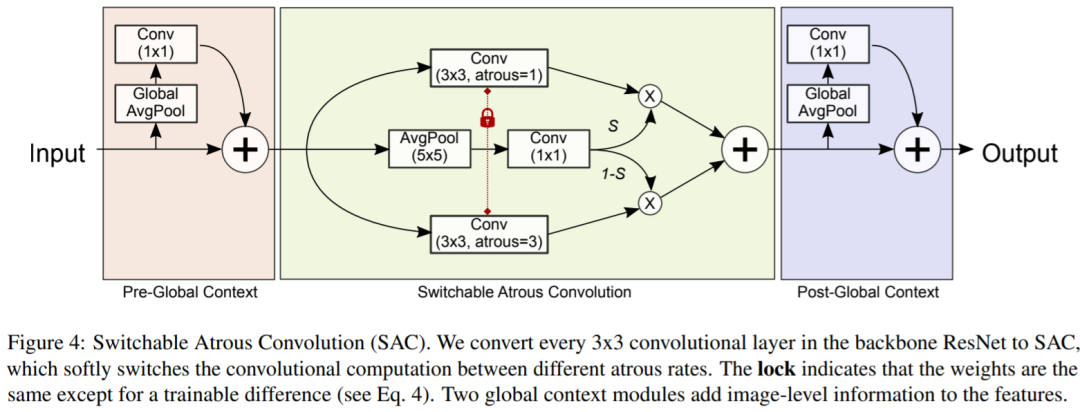
SAC 在检测器中的使用方法如下(大家也可以集成到自己的detector中,也许就可以快速涨点)
To use SAC in the detector, we convert all the standard 3x3 convolutional layers in the bottom-up backbone to SAC, which improves the detector performance by a large margin.
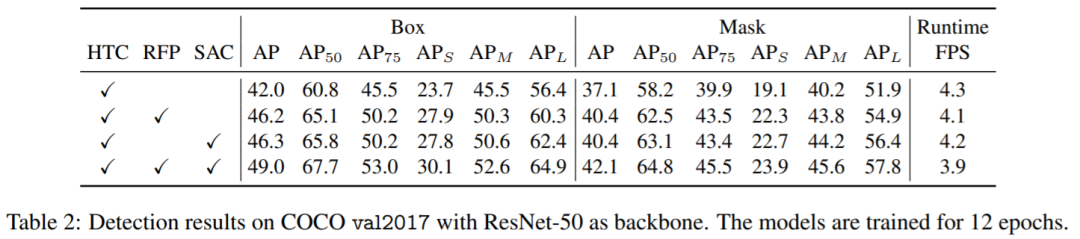
看一下,HTC(基于ResNet) + RFP + SAC 的涨点情况,直接从42.0 AP涨到49.0 AP
实验结果
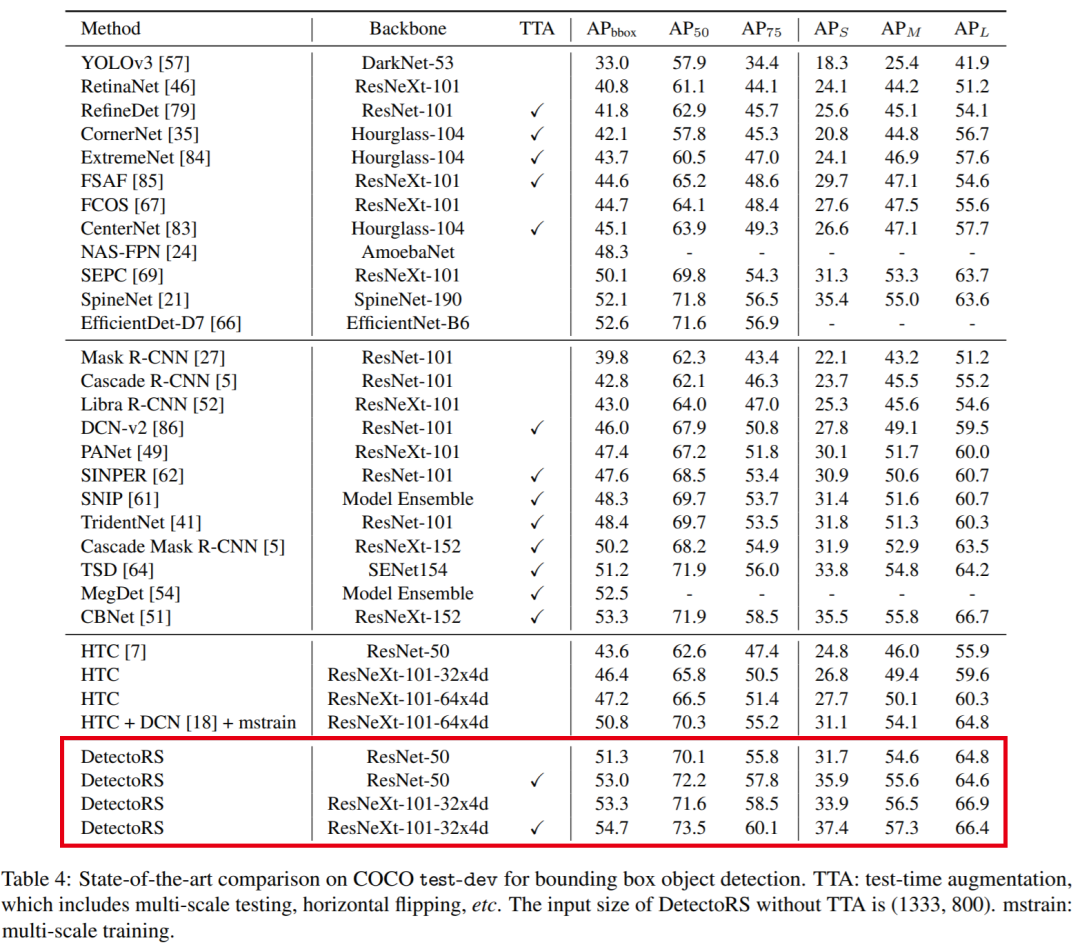
在COCO test-dev 目标检测中,DetectoRS达到54.7% AP!目前排名第一,遥遥领先!
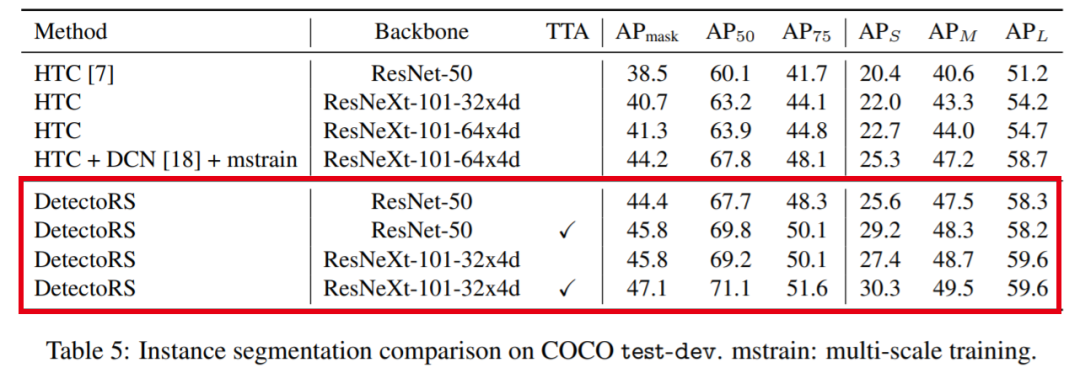
在COCO test-dev 实例分割中,DetectoRS达到47.1% AP!目前与ResNeSt并列排名第一!
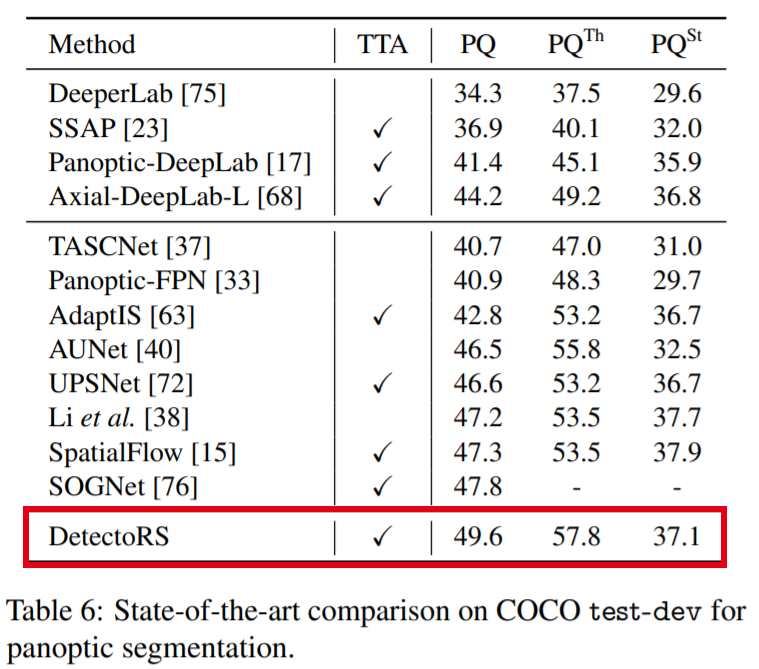
在COCO test-dev 全景分割中,DetectoRS达到49.6% PQ!目前排名第一,遥遥领先!
更多内容详见原论文,建议结合代码多读几遍(代码是基于mmdetection写的)
论文下载
在CVer公众号后台回复:DetectoRS,即可下载本论文
重磅!CVer-目标检测 微信交流群已成立
扫码添加CVer助手,可申请加入CVer-目标检测 微信交流群,目前已汇集3800人!涵盖2D/3D目标检测、小目标检测、遥感目标检测等。互相交流,一起进步!
同时也可申请加入CVer大群和细分方向技术群,细分方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如目标检测+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加群

▲长按关注我们
麻烦给我一个在看!



